All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(14526 productos disponibles)















 Ready to Ship
Ready to Ship






 Ready to Ship
Ready to Ship



 Ready to Ship
Ready to Ship













 Ready to Ship
Ready to Ship






























 Ready to Ship
Ready to Ship





 Ready to Ship
Ready to Ship



















 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship

 Ready to Ship
Ready to Ship











































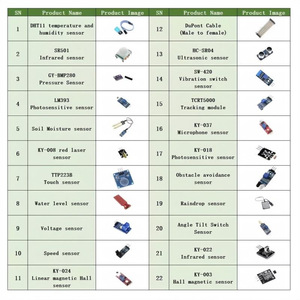
Los sensores robóticos son componentes electrónicos diseñados para detectar y responder a estímulos del entorno. Los sensores en robótica suelen estar conectados al sistema de control del robot a través de un circuito de interfaz. La información de estos sensores guía al robot sobre qué acción tomar. Los sensores en robótica tienen diferentes tipos, cada uno adaptado para cumplir una función específica. A continuación se presentan algunos tipos comunes de sensores en robótica:
Sensores de Proximidad
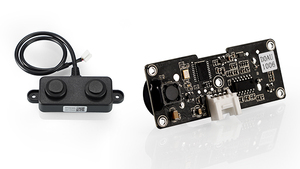
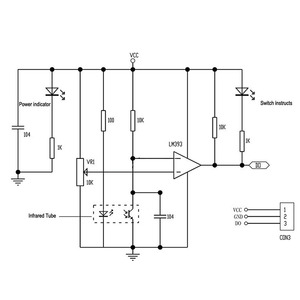
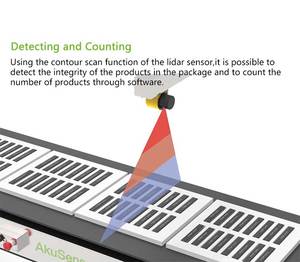
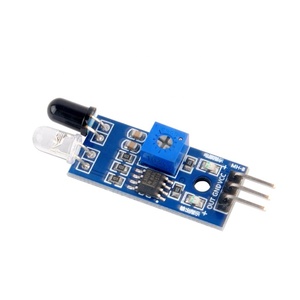
Los sensores de proximidad están diseñados para detectar objetos cercanos sin necesidad de hacer contacto con ellos. Pueden percibir la presencia de un objeto y su distancia en relación al sensor. Los sensores de proximidad utilizan diferentes tecnologías para detectar objetos. Por ejemplo, los sensores de proximidad capacitiva utilizan la conductividad eléctrica para detectar un objeto, mientras que los sensores de proximidad inductiva utilizan un cambio en la inductancia para detectar objetos metálicos. Los sensores de proximidad infrarrojos y ultrasónicos utilizan luz infrarroja y ondas sonoras, respectivamente, para detectar objetos.
Sensores de Luz
Los sensores de luz, también conocidos como sensores ópticos, están diseñados para medir la intensidad de la luz. Estos sensores pueden medir diferentes tipos de luz, incluida la luz visible, infrarroja y radiación ultravioleta. Los sensores ópticos convierten la luz en una señal eléctrica que el sistema de control del robot puede utilizar. Los sensores de luz son componentes cruciales en robots alimentados por energía solar, ya que ayudan a monitorear y optimizar el uso de la energía. También se utilizan en robots industriales para el control de calidad, asegurando niveles de luz consistentes durante el proceso de producción.
Sensores de Temperatura
Los sensores de temperatura miden los cambios de temperatura en el entorno. Son esenciales para los robots que operan en condiciones extremas, como los robots de exploración en aguas profundas, los robots industriales en procesos de fabricación y los robots médicos en el cuidado del paciente. Al monitorear los niveles de temperatura, estos sensores pueden ayudar a prevenir daños en el sistema del robot o garantizar que se cumplan los procesos que requieren condiciones de temperatura específicas. Los tipos comunes de sensores de temperatura incluyen termopares, dispositivos de temperatura resistiva y sensores de temperatura infrarrojos.
Sensores de Presión
Los sensores de presión miden la fuerza ejercida por un fluido (líquido o gas) por unidad de área sobre la superficie de un objeto. Estos sensores son vitales en robots de exploración submarina, procesos de automatización industrial, robots médicos y drones, donde monitorear los cambios de presión es crítico para la seguridad y la eficiencia operativa. Los sensores de presión convierten la presión mecánica en una señal eléctrica que el sistema robótico puede leer. Ayudan a asegurar que se mantengan condiciones de presión específicas durante varios procesos.
Sensores de Fuerza y Torque
Los sensores de fuerza y torque miden las fuerzas y torques ejercidos entre el robot y su entorno. Son cruciales en tareas que requieren precisión y delicadeza, como las tareas de ensamblaje en robots industriales, robots quirúrgicos y robots colaborativos que trabajan junto a humanos. Al proporcionar retroalimentación sobre las fuerzas de interacción, estos sensores mejoran la seguridad y aseguran la calidad en varias aplicaciones robóticas.
Sensores de Humedad
Los sensores de humedad, también conocidos como higrómetros, miden el contenido de humedad en el aire. Juegan un papel significativo en el monitoreo y control ambiental en robots agrícolas, drones de monitoreo meteorológico y robots industriales que operan en condiciones ambientales específicas. Al rastrear los niveles de humedad, estos sensores pueden ayudar a garantizar condiciones óptimas para varios procesos.
Sensores de Sonido
Los sensores de sonido miden los niveles de sonido o frecuencias de sonido específicas dentro de un entorno. Son esenciales para drones de vigilancia, robots diseñados para operaciones de búsqueda y rescate mediante la detección de sonidos indicativos de presencia humana o angustia, y robots industriales para el control de calidad al monitorear los niveles de sonido en los procesos de producción.
Los sensores robóticos tienen diferentes especificaciones dependiendo de su función y tipo. Aquí hay algunas especificaciones generales para ayudar a los usuarios a seleccionar el sensor adecuado para sus necesidades:
Los sensores robóticos requieren un mantenimiento regular para asegurar que funcionen correctamente y duren más tiempo. Aquí hay algunos consejos generales de mantenimiento de sensores:
Al elegir un sensor para un proyecto de robótica, considere los factores importantes para el proyecto o aplicación.
Entorno
¿Cómo es el entorno en el que el sensor tendrá que operar? ¿Es un entorno interior o exterior? ¿Cuáles son las condiciones ambientales? ¿Hay temperaturas extremas, niveles de humedad, polvo u otros contaminantes presentes? Si el sensor se utilizará en un entorno hostil, es importante elegir sensores que estén diseñados específicamente para soportar condiciones difíciles.
Tipo de medición
¿Qué requiere el proyecto medir? Diferentes sensores están diseñados para medir diferentes parámetros. Es importante elegir un sensor que mida el parámetro requerido. Por ejemplo, si se requiere medir distancias, es necesario seleccionar un sensor ultrasónico o un telémetro láser.
Rango y sensibilidad
Considere el rango de medición que requiere el proyecto y la sensibilidad o resolución que se necesita. Es importante elegir un sensor con el rango de medición y la sensibilidad apropiados. Por ejemplo, si se requiere medir pequeños cambios en la temperatura, es necesario seleccionar un sensor de temperatura de alta sensibilidad.
Velocidad de respuesta
Considere el tiempo de respuesta requerido para que la medición sea relevante. Es importante elegir un sensor con una velocidad de respuesta apropiada. Por ejemplo, si se requiere medir objetos en movimiento rápido, es necesario seleccionar un sensor con un tiempo de respuesta rápido.
Interfaz y compatibilidad
Considere la interfaz del sensor del proyecto y si es compatible con el sistema de control del robot. Es importante elegir un sensor con una interfaz apropiada para la comunicación con el sistema de control. Por ejemplo, si el proyecto requiere un sensor con una interfaz específica, es necesario seleccionar un sensor con una interfaz serie o I2C.
Consumo de energía
Considere los requisitos de energía del sensor y si es compatible con el sistema de energía del robot. Si el robot funciona con batería y requiere una larga duración, es importante elegir un sensor de bajo consumo.
Costo
Considere el costo del sensor y si se ajusta al presupuesto del proyecto. Es importante elegir un sensor que cumpla con los requisitos del proyecto a un costo asequible.
Fiabilidad y durabilidad
Considere la fiabilidad y durabilidad del sensor. Es importante elegir un sensor que pueda soportar el entorno operativo y que sea fiable para un funcionamiento continuo.
Calibración y mantenimiento
Considere los requisitos de calibración y mantenimiento del sensor. Es importante elegir un sensor que sea fácil de calibrar y que requiera un mantenimiento mínimo.
El reemplazo de sensores robóticos es un proceso simple. Con las herramientas adecuadas y un conocimiento básico de robótica, cualquier entusiasta de la robótica puede reemplazar un sensor defectuoso. A continuación, se presenta una guía sobre cómo reemplazar un sensor ultrasónico en un robot.
Herramientas Necesarias:
Pasos:
Lo anterior es cómo reemplazar un sensor ultrasónico. Otros sensores en robótica se reemplazan de la misma manera. Los entusiastas del bricolaje pueden encontrar varias guías en línea sobre cómo reemplazar diferentes tipos de sensores en robots.
Q1: ¿Cuál es el futuro de los sensores en robótica?
A1: El futuro de los sensores en robótica es prometedor. Habrá desarrollos continuos en la tecnología de sensores, como mejoras en la inteligencia artificial y el aprendizaje automático, que permitirán a los robots utilizar sensores de manera más eficaz.
Q2: ¿Pueden los usuarios actualizar sensores en robots existentes?
A2: Sí, es posible actualizar los sensores en robots existentes, pero esto puede requerir experiencia adicional y personalización para integrar nuevos sensores de manera efectiva.
Q3: ¿Cuál es la diferencia entre sensores táctiles y no táctiles en robótica?
A3: Los sensores táctiles requieren contacto físico con el objeto que detectan. En cambio, los sensores no táctiles no requieren contacto físico, como las cámaras o los sensores ultrasónicos.