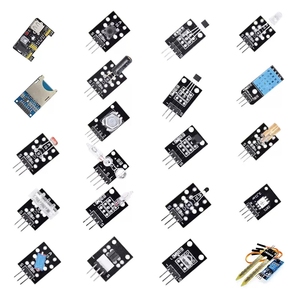
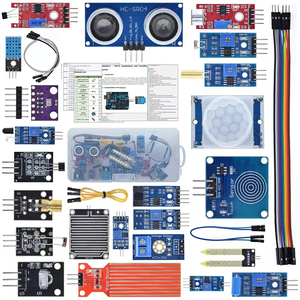
Tipos de sensores en robótica
Los robots son una parte muy importante del mundo moderno, y siguen volviéndose más inteligentes. Los **tipos de sensores en robótica** ayudan a que estos robots sean conscientes de su entorno. Los sensores les dan a los robots la capacidad de detectar cambios en su entorno. A continuación se presentan algunos tipos comunes de sensores utilizados en robótica:
- Sensores de proximidad: Estos sensores se utilizan para detectar la presencia de un objeto que está cerca sin ningún contacto físico. Los sensores de proximidad utilizan campos electromagnéticos o haces de radiación para detectar objetos cercanos. Se utilizan ampliamente en aplicaciones industriales como líneas de ensamblaje. Los sensores de proximidad vienen en varios tipos, incluidos los sensores capacitivos, los sensores inductivos y los sensores ultrasónicos. Los sensores capacitivos detectan cambios en la capacitancia, mientras que los sensores inductivos detectan objetos metálicos.
- Sensores de luz: Estos sensores miden la cantidad de luz ambiental en un entorno. Se utilizan para controlar la iluminación automática y otras aplicaciones que requieren la medición de la intensidad de la luz. Se utilizan diferentes tipos de sensores de luz en robótica, incluidos fototransistores, fotodiodos y resistencias dependientes de la luz (LDR). Los fototransistores amplifican la corriente generada por la luz, mientras que los fotodiodos convierten la luz en una corriente eléctrica.
- Sensores de temperatura: Tal como su nombre lo indica, los sensores de temperatura miden la temperatura. Se utilizan en robótica para monitorear las condiciones ambientales y mantener las condiciones de funcionamiento óptimas. Los tipos comunes de sensores de temperatura utilizados en robótica incluyen termopares, detectores de temperatura resistivos (RTD) y termistores. Los termopares consisten en dos metales diferentes que generan un voltaje cuando se exponen a diferencias de temperatura. Los RTD y los termistores cambian la resistencia con las variaciones de temperatura.
- Sensores de presión: Estos sensores miden la presión en gases y líquidos. Los sensores de presión se utilizan en robótica para monitorear los sistemas de fluidos y garantizar un funcionamiento seguro. Hay muchos tipos de sensores de presión, pero los más comunes son los sensores piezoeléctricos, los sensores capacitivos y los sensores de galgas extensométricas. Los sensores de presión capacitivos miden los cambios de presión como variaciones en la capacitancia entre dos placas.
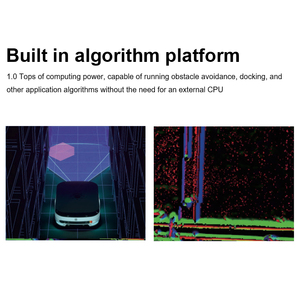
- Sensores de cámara: Estos sensores capturan información visual en un entorno. Los sensores de cámara les dan a los robots la capacidad de ver y analizar sus entornos. Los sensores de cámara son importantes en aplicaciones como la navegación autónoma, la detección de objetos y el reconocimiento facial. Los sensores CCD (dispositivo de carga acoplada) y CMOS (semiconductor de óxido metálico complementario) se utilizan ampliamente en robótica.
- Sensores de gas: Los sensores de gas detectan la presencia de gases específicos en el entorno. Se utilizan en robótica para aplicaciones como la detección de fugas de gas y el monitoreo de la calidad del aire. Los sensores de gas pueden ser electroquímicos, de óxido metálico o catalíticos. Los sensores de gas de óxido metálico son los más comunes porque ofrecen alta sensibilidad a varios gases.
- Sensores de sonido: Estos sensores detectan niveles de sonido o frecuencias de sonido específicas en el entorno. Miden las ondas sonoras y las convierten en señales eléctricas. Los sensores de sonido permiten a los robots escuchar y responder a señales de audio. El sensor de sonido más común utilizado en robótica es el micrófono, que convierte las ondas sonoras en señales eléctricas.
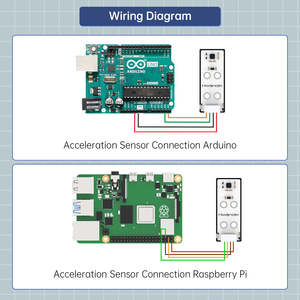
- Unidades de medición inercial (IMU): Estos sensores miden el movimiento y la orientación del robot. Combinan acelerómetros, giroscopios y, a veces, magnetómetros para rastrear cambios en la velocidad, la rotación y los campos magnéticos. Las IMU son cruciales para la navegación, la estabilización y el control preciso de los sistemas robóticos. Permiten a los robots comprender su posición y movimiento en el espacio.
Mantenimiento de sensores en robótica
Al igual que cualquier otra parte del robot, los sensores deben mantenerse para que sean duraderos y efectivos. Estas son algunas de las prácticas que los usuarios pueden adoptar para mantener los sensores en los robots:
- Inspección regular: Esto implica verificar los sensores regularmente para identificar cualquier daño o desgaste. La detección temprana de problemas garantiza que las reparaciones se realicen antes de que los sensores dejen de funcionar.
- Limpieza: Los sensores sucios pueden dar lecturas inexactas. Por lo tanto, los usuarios deben mantener los sensores limpios para mantener su precisión. También es importante utilizar los productos y técnicas de limpieza recomendados para evitar dañar los sensores.
- Calibración: Con el tiempo, las lecturas de los sensores pueden desviarse de los valores reales. Esto puede ser causado por factores ambientales o desgaste normal. La calibración es el proceso de ajustar la salida del sensor para que coincida con los valores esperados. Esto se hace comparando la lectura del sensor con una referencia estándar y realizando los ajustes necesarios.
- Actualizaciones de firmware: Algunos sensores tienen cambios integrados que mejoran el rendimiento y agregan nuevas funciones. Los fabricantes lanzan actualizaciones para mejorar la funcionalidad de los sensores. Por lo tanto, los usuarios deben verificar rutinariamente si hay actualizaciones de este tipo e instalarlas según las instrucciones del fabricante.
- Medidas de protección: Tomar medidas de protección contra condiciones ambientales extremas, humedad y polvo puede aumentar la vida útil de los sensores. Los usuarios deben instalar sensores que tengan cubiertas o recintos de protección incorporados.
- Piezas de repuesto: Es aconsejable tener sensores de repuesto y piezas de repuesto. Esto garantiza que los robots no estén inactivos mientras los usuarios esperan que se realicen las reparaciones.
- Seguir las pautas del fabricante: Los usuarios deben seguir las pautas de mantenimiento proporcionadas por el fabricante. Esto se debe a que el fabricante conoce mejor el producto y puede proporcionar procedimientos de mantenimiento precisos.
Cómo elegir tipos de sensores en robótica
Elegir el sensor adecuado para una aplicación robótica requiere comprender los requisitos del sistema robótico y el entorno en el que operará.
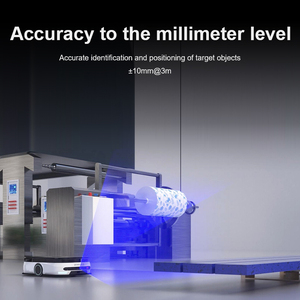
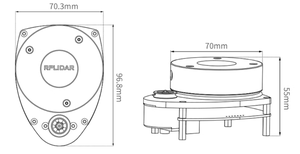
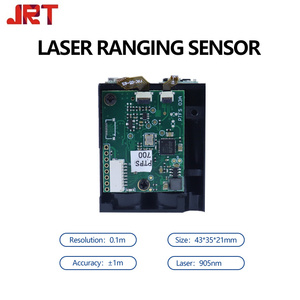
- Considere la aplicación: Para detectar la distancia, como en un vehículo autónomo para la detección de objetos, utilice sensores ultrasónicos o LIDAR. Utilice sensores de temperatura para robots industriales que manejan materiales que requieren monitoreo de temperatura.
- Consideraciones ambientales: Algunos sensores son más adecuados para entornos específicos. Por ejemplo, los sensores ópticos pueden tener dificultades en condiciones de polvo o poca luz. En tales casos, se prefieren alternativas robustas como los sensores IR o ultrasónicos.
- Rango y sensibilidad: Se debe considerar el rango de medición requerido y lo que se necesita detectar o medir. Se requieren sensores de fuerza con alta sensibilidad para aplicaciones que involucran ensamblaje delicado o manejo de componentes frágiles.
- Integración y compatibilidad: Es esencial asegurarse de que los sensores sean compatibles con los sistemas existentes del robot. Los sensores de proximidad que pueden comunicarse a través de protocolos estándar como I2C o SPI se integran fácilmente.
- Fiabilidad y robustez: En entornos industriales, los sensores como los sensores de visión deben ser fiables y robustos, incluso en entornos hostiles con vibraciones, polvo y variaciones de temperatura.
- Costo y restricciones presupuestarias: Los sensores de alta precisión como LIDAR pueden ser costosos, por lo que es posible que deba realizar compensaciones. Equilibrar el rendimiento y el costo es crucial, especialmente cuando se opera dentro de un presupuesto.
Cómo hacer bricolaje y reemplazar tipos de sensores en robótica
Los sensores de robots son una parte integral del sistema nervioso de un robot. Sin ellos, el robot no podría sentir su entorno y responder de manera adecuada. Así es como se reemplazan:
- Reúna las herramientas adecuadas para el trabajo. Esto puede incluir destornilladores, alicates y otras herramientas especializadas que serán necesarias para quitar y reemplazar el sensor. Además, asegúrese de que el nuevo sensor que se va a instalar sea el correcto para el robot y esté en buen estado de funcionamiento.
- Apague el robot para evitar cualquier peligro eléctrico o daño al robot mientras realiza el reemplazo del sensor.
- Dependiendo del tipo de sensor que se esté reemplazando, es posible que deba desmontar una parte del robot para acceder al sensor. Esto podría implicar quitar una cubierta o acceder al sensor a través de una abertura designada.
- Desconecte cuidadosamente el sensor de los sistemas eléctricos y mecánicos del robot. Esto puede implicar quitar tornillos, desconectar cables o desenchufar conectores.
- Una vez que se haya retirado el sensor antiguo, instale cuidadosamente el nuevo sensor conectándolo a los sistemas eléctricos y mecánicos del robot. Asegúrese de que todas las conexiones estén seguras y de que el sensor esté correctamente alineado y posicionado.
- Después de instalar el nuevo sensor, vuelva a ensamblar cualquier parte del robot que se haya desarmado y asegúrese de que todo esté correctamente sellado y asegurado.
- Encienda el robot y pruebe el nuevo sensor para asegurarse de que funcione correctamente. Esto puede implicar ejecutar pruebas de diagnóstico, realizar la calibración del sensor o realizar pruebas de funcionamiento para verificar el rendimiento y la precisión del sensor.
Preguntas y Respuestas
P1: ¿Qué son los sensores en robótica?
A1: Los sensores en robótica son dispositivos que permiten a los robots percibir su entorno y recopilar datos. Al detectar cambios en el entorno, estos sensores proporcionan a los robots información que les permite tomar decisiones informadas y responder de manera adecuada.
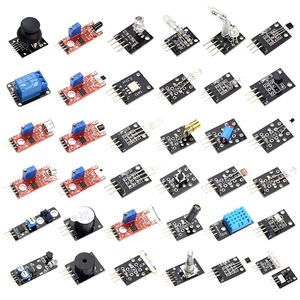
P2: ¿Cuáles son los tipos de sensores en robótica?
A2: Hay varios tipos de sensores en robótica, incluidos sensores ultrasónicos, sensores táctiles, sensores de luz, sensores de temperatura y sensores de giroscopio. Cada sensor detecta datos específicos del entorno, lo que permite a los robots comprender e interactuar con su entorno.
P3: ¿Cómo funcionan los sensores robóticos?
A3: Los sensores robóticos funcionan detectando propiedades físicas o cambios en el entorno y convirtiéndolos en señales que pueden ser procesadas por el sistema de control del robot. Esto permite al robot percibir su entorno y tomar decisiones basadas en los datos detectados.






 Ready to Ship
Ready to Ship