
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(747 productos disponibles)































































 Ready to Ship
Ready to Ship
























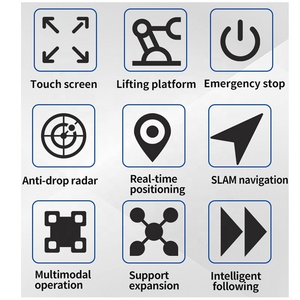



























































































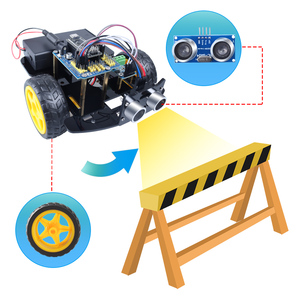
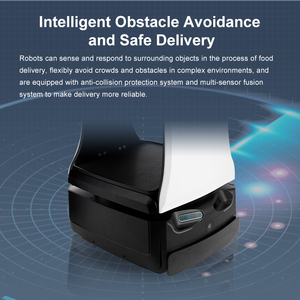
La detección de obstáculos en robots es crucial para la navegación autónoma, asegurando la seguridad y la eficiencia. Diversos sensores y tecnologías permiten a los robots percibir e interpretar su entorno, permitiendo un movimiento e interacción sin problemas en entornos diversos. Estos son los tipos de detección de obstáculos en robots:
Sensores Lidar
Los sensores Lidar (Light Detection and Ranging) son sistemas avanzados de detección de obstáculos que utilizan rayos láser para escanear el entorno. Estos sensores emiten pulsos láser rápidos, midiendo el tiempo que tardan los pulsos en rebotar después de golpear un objeto. Estos datos de tiempo de vuelo se convierten en mediciones de distancia precisas, creando un mapa 3D detallado de los alrededores. Los sensores Lidar sobresalen en la detección de obstáculos con alta precisión y resolución, haciéndolos indispensables para vehículos autónomos y robots que navegan por entornos complejos. Su capacidad de proporcionar un mapeo preciso en tiempo real permite una navegación segura y confiable, incluso en entornos dinámicos e impredecibles.
Sensores Infrarrojos
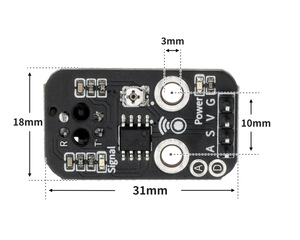
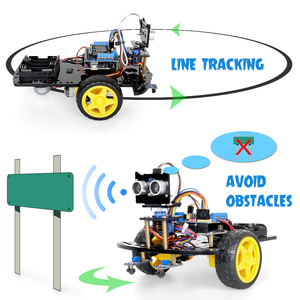
Los sensores infrarrojos son dispositivos especializados de detección de obstáculos que aprovechan la luz infrarroja para identificar objetos cercanos y posibles barreras. Estos sensores emiten luz infrarroja y monitorean los patrones de reflexión y absorción de la luz emitida por los objetos circundantes. Al analizar los cambios en la luz infrarroja reflejada o absorbida, los sensores pueden detectar obstáculos y evaluar su proximidad al robot. Sus capacidades de detección confiables y sin contacto hacen que los sensores infrarrojos sean ampliamente utilizados en robótica para diversas aplicaciones, como la prevención de colisiones, el seguimiento de objetos y el monitoreo ambiental.
Sensores Sonar
Los sensores Sonar, también conocidos como sensores ultrasónicos, son vitales en la detección de obstáculos y la medición de distancias en robótica. Estos sensores emiten ondas ultrasónicas y analizan las señales reflejadas de los objetos circundantes. Al medir el retardo de tiempo entre las señales ultrasónicas emitidas y recibidas, los sensores Sonar pueden determinar distancias y detectar obstáculos en la trayectoria del robot. Su capacidad de operar en diversas condiciones ambientales, incluyendo baja luz y variaciones de color, hace que los sensores Sonar sean indispensables para robots que navegan por entornos complejos y dinámicos. Esto garantiza una operación segura y confiable, mejorando el rendimiento general y la versatilidad de los sistemas robóticos.
Sistemas basados en cámaras
Estos sistemas son tecnologías avanzadas de detección de obstáculos en robots que aprovechan la visión por computadora para analizar el entorno en detalle. Al procesar datos visuales de las cámaras, estos sistemas pueden identificar y categorizar obstáculos, reconocer patrones y rastrear objetos dinámicos. Esta capacidad permite a los robots comprender su entorno contextualmente, facilitando la toma de decisiones complejas y la navegación en tiempo real. Los sistemas basados en cámaras proporcionan una rica capa de percepción visual, mejorando la detección de obstáculos y habilitando capacidades avanzadas como el reconocimiento de gestos, la identificación facial y la comprensión de escenas, las cuales son cruciales para robots de servicio, industriales y de investigación.
Telémetros láser
Los telémetros láser son sensores ópticos especializados que miden distancias con alta precisión utilizando rayos láser. Estos sensores emiten un pulso láser y analizan la señal reflejada de los objetos o obstáculos circundantes. Al medir el retardo de tiempo entre los pulsos láser emitidos y devueltos, los telémetros pueden determinar distancias con una precisión de nivel milimétrico. Esta capacidad permite a los robots crear mapas detallados de su entorno, detectar obstáculos y navegar con precisión. Las capacidades de alta resolución y medición de largo alcance de los telémetros láser los hacen indispensables para vehículos autónomos y tareas de automatización industrial, asegurando una operación segura y eficiente.
La especificación de la detección de obstáculos en robots depende de varios factores. Esto incluye el tipo de robot, su aplicación prevista y la tecnología utilizada para la detección. A continuación, se presentan algunas de las especificaciones generales de la detección de robots:
La detección de obstáculos en robots requiere un mantenimiento regular para funcionar de manera óptima y confiable. A continuación, se presentan algunos de los requisitos de mantenimiento:
Los compradores de negocios deben considerar lo siguiente al seleccionar sistemas de detección de obstáculos en robots:
Entorno
El entorno operativo juega un papel crucial en la elección de la tecnología de detección de obstáculos adecuada. El Lidar es excelente para la navegación al aire libre y la detección de largo alcance, mientras que los sensores ultrasónicos funcionan bien para entornos interiores y detección de corto alcance. Para entornos complejos y dinámicos, una fusión de cámaras y Lidar puede proporcionar una detección de obstáculos robusta.
Tamaño y velocidad del robot
El tamaño y la velocidad del robot influyen en la elección de los sistemas de detección. Los robots más pequeños pueden requerir sensores de corto alcance más precisos para evitar colisiones, mientras que los robots industriales más grandes pueden necesitar detección de largo alcance para planificar sus movimientos. Los robots móviles autónomos (AMR) rápidos requieren detección de obstáculos de alta precisión para reaccionar rápidamente y evitar obstáculos.
Costo y complejidad
Los sistemas de detección de obstáculos varían desde soluciones simples de bajo costo hasta sistemas complejos de alto costo. Equilibra la precisión de detección requerida con el presupuesto. Considera la complejidad del sistema, incluida la potencia de procesamiento requerida y la complejidad del software. Un sistema más complejo puede necesitar más recursos para la integración, el mantenimiento y el desarrollo.
Nivel de integración
Considera el nivel de integración requerido con otros sistemas de robots. Algunos sistemas de detección de obstáculos proporcionan datos adicionales, como información de distancia e información de color o textura, que se pueden integrar en los sistemas de control y toma de decisiones del robot.
Robustez y confiabilidad
Los sistemas de detección de obstáculos deben ser robustos y confiables para un rendimiento constante. Considera las tolerancias ambientales, como la temperatura y la presencia de polvo o humedad. Evalúa la estabilidad a largo plazo y los requisitos de mantenimiento de la tecnología seleccionada.
Escalabilidad y flexibilidad
Si se consideran aplicaciones futuras o expansiones de la flota de robots, selecciona un sistema de detección de obstáculos que sea escalable y flexible. Asegúrate de que el sistema pueda adaptarse a diferentes tipos de robots y pueda ampliarse para incluir funciones o funcionalidades adicionales.
Seguridad y cumplimiento
Asegúrate de que el sistema de detección de obstáculos seleccionado cumpla con las normas y regulaciones de seguridad de la industria. Evalúa la confiabilidad y el rendimiento del sistema para minimizar los riesgos y garantizar la operación segura del robot.
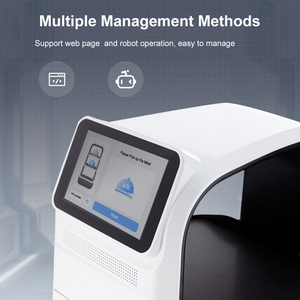
La mayoría de las aspiradoras robóticas con funciones avanzadas que detectan y evitan obstáculos tienen instrucciones fáciles de entender. Son fáciles de ensamblar y operar. Cuando busques una aspiradora robótica para vender, considera las que tengan interfaces fáciles de usar. A continuación, se presentan los pasos generales sobre cómo operar y mantener la aspiradora.
Una vez que la aspiradora robótica esté cargada, estará lista para funcionar. Presiona el botón de limpieza y comenzará a limpiar. Los usuarios pueden elegir la opción de limpieza que prefieran. Después de limpiar, es aconsejable vaciar el depósito de polvo y limpiar el filtro con regularidad.
Es importante reemplazar los sensores con regularidad para mantener un alto rendimiento. Dependiendo del modelo, los usuarios pueden abrir el robot quitando los tornillos o simplemente desenganchando la cubierta. Luego, saca los sensores viejos y reemplázalos con otros nuevos. Después de eso, prueba el robot para ver si funciona correctamente.
P1: ¿Cómo funciona la detección de obstáculos en robots?
A1: La detección de obstáculos en robots utiliza sensores y cámaras para identificar y evaluar el entorno. Estos componentes recopilan datos, que son procesados por algoritmos para detectar y clasificar posibles obstáculos.
P2: ¿Cuáles son los beneficios de la detección de obstáculos en robots?
A2: La detección de obstáculos en robots permite que los robots naveguen de forma segura y eficiente. Esta característica reduce el riesgo de accidentes, aumenta el nivel de automatización y mejora la confiabilidad general del robot.
P3: ¿Se puede agregar la detección de obstáculos en robots a los robots existentes?
A3: Sí, la detección de obstáculos en robots se puede integrar en robots existentes. Se pueden implementar sensores y software adicionales para proporcionar capacidades de detección de obstáculos.

















