All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(13499 productos disponibles)





























































































































































































Los robots controlados por PLC vienen en diferentes tipos, cada uno con diferentes propósitos en diversas industrias. Estos son algunos tipos comunes de robots controlados por PLC:
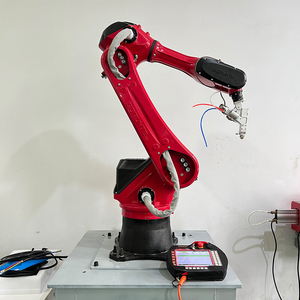
Robots articulados
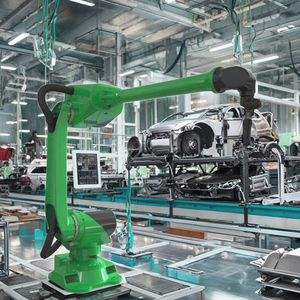
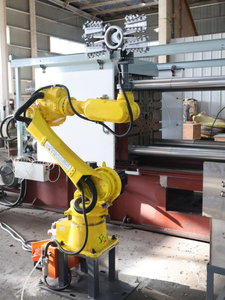
Estos son comúnmente conocidos como brazos robóticos. Contienen seis o más articulaciones que son móviles. Las articulaciones aseguran que los brazos sean flexibles y puedan rotar en varias direcciones. Los robots articulados se utilizan en soldadura, manipulación de materiales, montaje, empaquetado y pintura. Los robots requieren PLC para garantizar la precisión en las tareas.
Robots SCARA
SCARA es una abreviatura de Selective Compliance Assembly Robot Arm. Los robots tienen dos brazos paralelos que trabajan juntos. Proporcionan movimiento horizontal mientras mantienen la integridad vertical. Los robots se utilizan en montaje, empaquetado, funciones de recogida y colocación y aplicaciones de prueba. Los robots utilizan PLC para mejorar la precisión en las líneas de montaje y los procesos de fabricación.
Robots Delta
Los robots tienen un diseño único que se asemeja a un dron volador. Están construidos con tres brazos que están conectados a una base común. Los robots Delta se utilizan en aplicaciones de envasado, clasificación, recogida y colocación y montaje. Utilizan PLC para garantizar operaciones precisas y rápidas.
Robots cilíndricos
Los robots cilíndricos tienen un brazo robótico montado en una articulación rotatoria. Utilizan un sistema de coordenadas cilíndricas que combina un brazo que es lineal y rotatorio. Los robots se utilizan en aplicaciones de montaje, soldadura, manipulación de materiales y empaquetado. Los robots utilizan PLC para controlar las articulaciones rotatorias y los brazos lineales.
Robots cartesianos
Los robots también se conocen como robots de pórtico. Tienen tres articulaciones lineales que se operan en un sistema de coordenadas cartesianas. Las articulaciones son X, Y y Z. Los robots cartesianos se utilizan en aplicaciones de montaje, impresión 3D, empaquetado y soldadura. Los robots utilizan PLC para controlar los movimientos lineales de los brazos.
Al seleccionar un robot controlado por PLC para una aplicación específica, se deben considerar varios factores críticos para garantizar un rendimiento, confiabilidad y eficiencia óptimos. Estos factores incluyen el entorno en el que operará el robot, las tareas que realizará y los niveles requeridos de precisión y velocidad. Además, la adaptabilidad del robot a diferentes tareas, sus requisitos de programación e integración, y el costo total de propiedad son consideraciones esenciales. Al evaluar cuidadosamente estos factores, las industrias pueden elegir el robot controlado por PLC más adecuado que satisfaga sus necesidades y mejore la productividad.
Una de las principales consideraciones al seleccionar un robot controlado por PLC es el entorno en el que operará. Los robots diseñados para entornos hostiles, como temperaturas extremas, humedad o exposición a productos químicos, requieren una construcción robusta con las características de sellado y protección adecuadas. Por otro lado, los robots que operan en entornos limpios, como el procesamiento de alimentos o los productos farmacéuticos, deben cumplir con estrictos estándares de higiene y ser fáciles de limpiar.
Las tareas que realizará un robot controlado por PLC influyen significativamente en su selección. Diferentes tareas requieren diferentes niveles de precisión y velocidad. Por ejemplo, las tareas de montaje pueden requerir alta precisión, mientras que las tareas de empaquetado pueden necesitar alta velocidad. La capacidad del robot para realizar las tareas requeridas de manera eficiente es crucial para garantizar la productividad y la calidad.
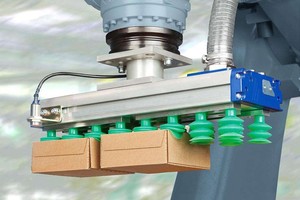
La adaptabilidad es otro factor esencial a considerar al seleccionar un robot controlado por PLC. A medida que las industrias evolucionan y surgen nuevas aplicaciones, los robots que se pueden reprogramar fácilmente o equipar con efectores finales intercambiables para realizar diferentes tareas ofrecerán un mejor retorno de la inversión. Esta flexibilidad permite que el robot se utilice en diversas aplicaciones, extendiendo su vida útil.
La programación e integración de un robot controlado por PLC con los sistemas y procesos existentes es una consideración importante. Las interfaces de programación fáciles de usar y la compatibilidad con las plataformas de software y hardware de uso común simplificarán la integración y reducirán el tiempo y el costo de implementación. Los robots con funciones de programación avanzadas, como la simulación y la programación en línea, permitirán una adaptación más rápida a las necesidades cambiantes de producción.
En general, el costo total de propiedad, incluida la inversión inicial, los costos de mantenimiento y asistencia, es una consideración importante. Si bien el costo inicial del robot puede ser significativo, también se deben considerar sus costos a largo plazo para garantizar una comprensión integral de la viabilidad económica del robot.
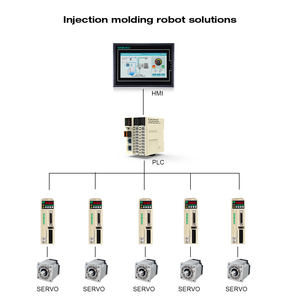
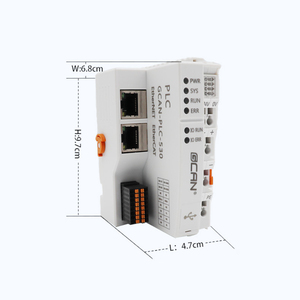
El diseño de un robot controlado por PLC normalmente implica varios componentes clave que trabajan juntos para crear un sistema versátil y automatizado. El PLC (Controlador Lógico Programable) sirve como la unidad de control central, responsable de la programación, el monitoreo y el control de las acciones del robot. Garantiza un control preciso y una adaptabilidad a diferentes tareas.
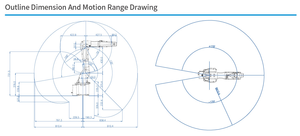
La estructura mecánica del robot incluye su cuerpo, articulaciones y actuadores, que determinan su forma, tamaño y rango de movimiento. Esta estructura está diseñada en función del tipo de robot, como brazos industriales, robots móviles o robots humanoides. Los sensores son vitales en el diseño, proporcionando retroalimentación y datos sobre el entorno del robot y su estado. Los sensores comunes incluyen cámaras, sensores de proximidad, codificadores y sensores de fuerza, lo que permite que el robot perciba su entorno y tome decisiones informadas.
Los actuadores y los motores son responsables del movimiento y la operación del robot, convirtiendo las señales eléctricas del PLC en movimiento físico. Estos componentes se seleccionan en función del rendimiento y la capacidad de carga requeridos. Los sistemas de alimentación y distribución proporcionan la electricidad necesaria al PLC y otros componentes, asegurando un funcionamiento confiable.
Las interfaces de comunicación permiten que el PLC se conecte con varios dispositivos y periféricos, permitiendo el intercambio de datos y la integración del sistema. El diseño también incorpora mecanismos de seguridad para proteger tanto al robot como a los operadores humanos, incluidas las paradas de emergencia, las barreras de seguridad y las señales de advertencia.
Las funciones de un robot controlado por PLC son diversas y se pueden adaptar para satisfacer necesidades específicas de automatización. Los robots industriales se utilizan comúnmente en entornos de fabricación y producción para realizar tareas como soldadura, montaje, pintura y manipulación de materiales. Los robots móviles encuentran aplicaciones en logística, atención médica y exploración, permitiendo la navegación autónoma y las tareas en entornos dinámicos.
Las características de los robots controlados por PLC contribuyen a su efectividad y versatilidad. La programación personalizable permite que los robots se programen de acuerdo con requisitos específicos, lo que permite flexibilidad y adaptabilidad a las tareas cambiantes. El diseño modular de los robots permite un fácil montaje, desmontaje y reconfiguración de sus componentes, promoviendo la versatilidad y el mantenimiento eficiente.
Las capacidades de interfaz permiten que los PLC se conecten con varios dispositivos, sensores y actuadores, expandiendo la funcionalidad del robot y permitiendo una integración perfecta con otros sistemas. Las funciones de comunicación y redes permiten que los robots compartan datos y se comuniquen con otros robots y dispositivos, facilitando las tareas colaborativas y el monitoreo remoto. Estas funciones, características y diseños de robots controlados por PLC los convierten en soluciones valiosas para diversas aplicaciones de automatización.
Antes de comprar un robot PLC, uno debe considerar la seguridad, la calidad y las certificaciones del robot. Garantizar la seguridad debe ser la primera prioridad cuando se trabaja con robots. Por lo tanto, uno debe elegir un robot diseñado con características de seguridad. Dichos robots tienen botones de parada de emergencia, protecciones de seguridad y sensores que previenen accidentes. Además, el robot debe cumplir con los estándares de calidad de la industria. Uno puede estar seguro de que un robot cumple con los estándares de calidad comprobando las certificaciones que tiene. Los robots utilizados en industrias como la fabricación, la salud y la construcción requieren una alta calidad y cumplimiento de la seguridad. Por lo tanto, es esencial elegir un robot que cumpla con los estándares de calidad y seguridad para proteger a los trabajadores y garantizar un funcionamiento fluido del robot.
Además, uno debe considerar la calidad de los componentes y la construcción del robot. Un robot bien construido con componentes de calidad será más duradero y confiable. La calidad también afecta la precisión y exactitud del robot, que son cruciales en tareas como la soldadura o el ensamblaje de maquinaria. Por lo tanto, es esencial elegir un robot fabricado con materiales de calidad y artesanía experta.
Hay diferentes tipos de certificaciones de calidad y seguridad que puede tener un robot de control PLC. Las más comunes son las certificaciones ISO, las marcas CE, el cumplimiento de RoHS y las certificaciones UL. Una certificación ISO demuestra que un fabricante de robots sigue procesos de fabricación de calidad. La marca CE muestra que un robot cumple con los estándares de calidad establecidos por la Unión Europea. Los robots con certificaciones de cumplimiento de RoHS están libres de materiales peligrosos. Las certificaciones UL muestran que un robot ha pasado pruebas de seguridad y la calidad ha sido aprobada por un tercero. Uno debe investigar y asegurarse de que el robot tiene las certificaciones necesarias antes de comprarlo.
¿Cuáles son las ventajas de usar PLC en robots industriales?
El control PLC en robots industriales viene con una gran cantidad de ventajas. Algunas de ellas incluyen una mayor confiabilidad, flexibilidad y escalabilidad. Además, tiene una mayor seguridad, integración y facilidad de programación.
¿Qué industrias utilizan robots controlados por PLC?
Un robot controlado por PLC se puede utilizar en una amplia gama de industrias. Algunos de ellos incluyen la fabricación, la automotriz, los alimentos y bebidas, los productos farmacéuticos y la electrónica. Otros incluyen el empaque, la logística y el almacenamiento, así como el petróleo y el gas.
¿Cómo mejora la eficiencia un robot controlado por PLC?
Los robots controlados por PLC mejoran la eficiencia automatizando tareas repetitivas, asegurando una calidad constante y reduciendo los tiempos de ciclo. Además, optimizan el uso de recursos y minimizan el desperdicio. Además, mejoran la precisión y exactitud de los procesos de producción.
¿Cuál es el papel de los sensores en los robots controlados por PLC?
Los sensores juegan un papel fundamental en los robots controlados por PLC al proporcionar datos en tiempo real sobre el entorno del robot y su propio estado. También permiten que el robot detecte y responda a los cambios en su entorno. Más importante aún, mejoran la precisión y confiabilidad del sistema.