All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1459 productos disponibles)








 Ready to Ship
Ready to Ship











 Ready to Ship
Ready to Ship









































 Ready to Ship
Ready to Ship





 Ready to Ship
Ready to Ship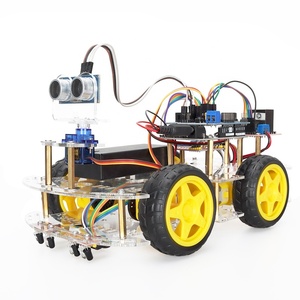





















 Ready to Ship
Ready to Ship











 Ready to Ship
Ready to Ship








































 Ready to Ship
Ready to Ship








La tecnología robótica impulsada por Arduino está ganando popularidad debido a su adaptabilidad y flexibilidad. Los robots basados en Arduino encuentran aplicaciones en diversos campos como la educación, la investigación, la industria y el entretenimiento. Se pueden controlar y programar para realizar tareas específicas. Los diferentes tipos de robots controlados por Arduino son los siguientes:
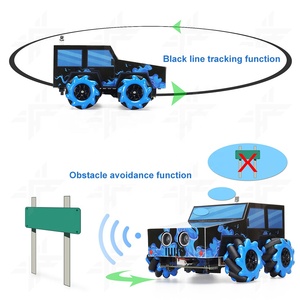
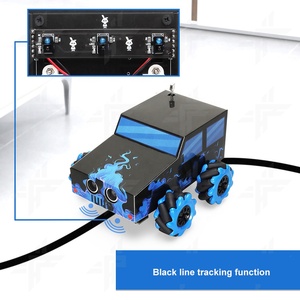
Robots seguidores de línea
Los robots seguidores de línea basados en Arduino están diseñados para rastrear y seguir líneas dibujadas en superficies. Estos tipos de robots encuentran aplicaciones en competiciones y juegos. Están equipados con sensores infrarrojos (IR) para detectar líneas. Los sensores se colocan en la parte frontal del robot. Pueden diferenciar entre la línea y la superficie. Esto se hace midiendo la reflexión de la luz. Los datos recopilados por los sensores se transmiten al microcontrolador Arduino. Se emiten instrucciones a los motores para mover el robot a lo largo de la línea.
Robots que evitan obstáculos
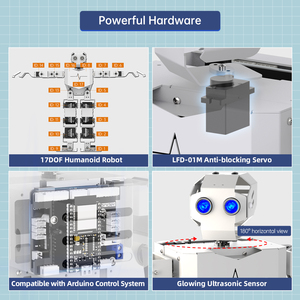
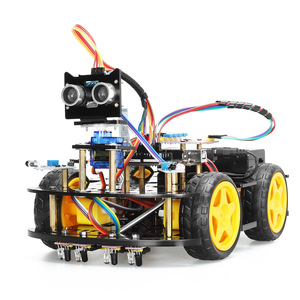
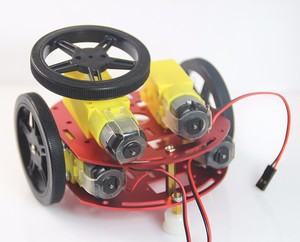
Los robots que evitan obstáculos están diseñados para navegar por entornos complejos. Estos robots se utilizan en operaciones de búsqueda y rescate, cartografía y exploración. Están equipados con sensores ultrasónicos. Los sensores miden la distancia entre el robot y cualquier objeto en los alrededores. Cuando se detecta un obstáculo a corta distancia, el robot está programado para cambiar su trayectoria y evitarlo. El proceso es fluido e instantáneo.
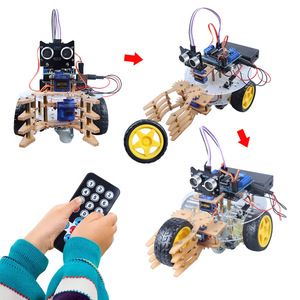
Robots controlados por remoto
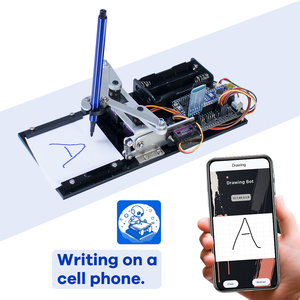
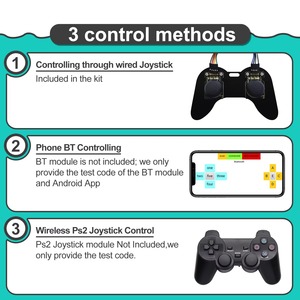
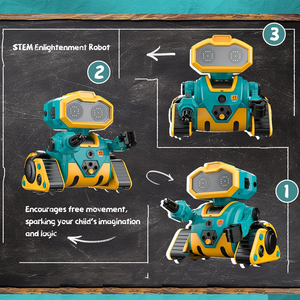
Los robots controlados por remoto están diseñados para fines de entretenimiento y educativos. Vienen con un módulo inalámbrico como Bluetooth o Wi-Fi para la comunicación. Estos módulos permiten el control a través de teléfonos inteligentes, tabletas u ordenadores. El módulo está conectado a la placa Arduino. Las órdenes se envían al robot a través de una aplicación o software dedicado. Los robots controlados por Bluetooth son populares entre los aficionados y estudiantes por su facilidad de uso.
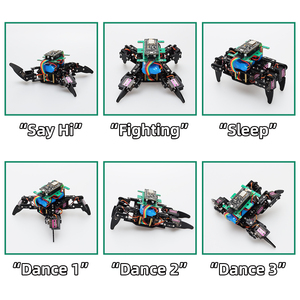
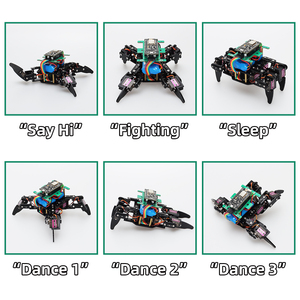
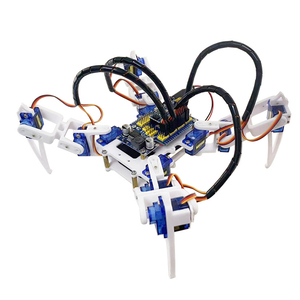
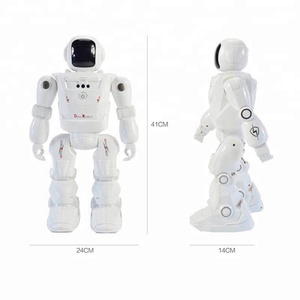
Robots humanoides
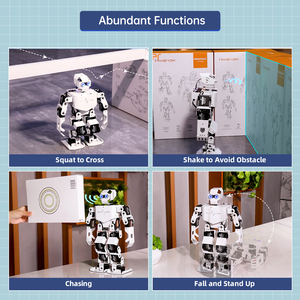
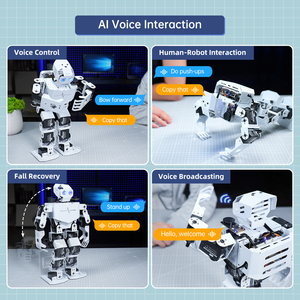
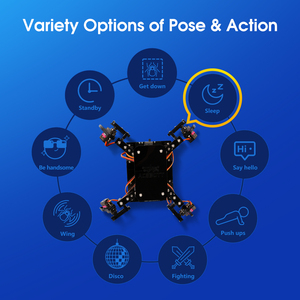
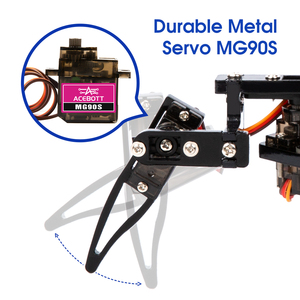
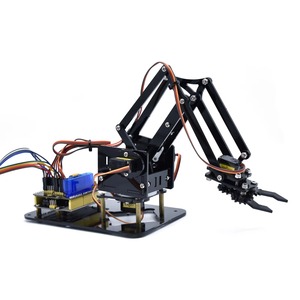
Los robots humanoides están diseñados para asemejarse e imitar las acciones humanas. Se utilizan en investigación, desarrollo y entretenimiento. Las placas Arduino se utilizan para controlar y programar robots humanoides. Los servomotores se utilizan para controlar los movimientos del robot. Esto incluye los brazos, las piernas y la cabeza. El robot está programado para realizar funciones como caminar, bailar y hablar. Puede responder a comandos e interactuar con la gente.
Robots automatizados
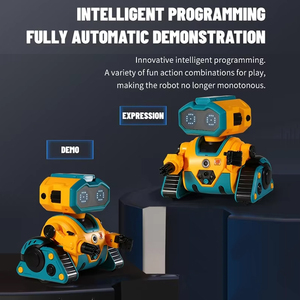
Los robots de automatización están diseñados para realizar tareas repetitivas. Están programados para llevar a cabo tareas con una mínima intervención humana. Estos tipos de robots pueden utilizarse en industrias, líneas de montaje y hogares. Las placas Arduino pueden controlar robots automatizados. Se pueden integrar con varios sensores, actuadores y herramientas. El tipo de tarea asignada al robot determina las herramientas y actuadores montados en él.
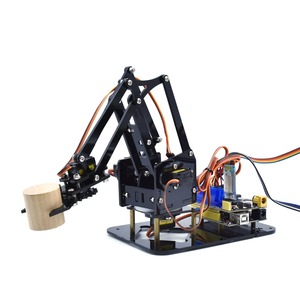
Al seleccionar un robot para control Arduino, hay que tener en cuenta varios factores para asegurarse de que se ajusta al propósito previsto, el nivel de habilidad y el presupuesto. Se debe comenzar por determinar el tipo de robot que se quiere construir. Los diferentes robots cumplen funciones distintas; por lo tanto, se debe analizar qué se quiere crear. Por ejemplo, si se necesita un robot para seguir líneas, un robot seguidor de líneas será la mejor opción. Por el contrario, si se busca un robot que pueda atravesar terrenos accidentados, entonces los robots con ruedas o con orugas son adecuados. Además, si se quiere un robot que pueda realizar múltiples tareas, como recoger objetos, un robot móvil o basado en brazos es la mejor opción.
Además, se debe considerar el terreno donde se va a utilizar el robot. Esto ayudará a determinar el mejor diseño y configuración a utilizar. Por ejemplo, algunos diseños son más adecuados para aplicaciones en interiores, mientras que otros lo son para tareas en exteriores. El siguiente factor a considerar es el presupuesto. Esto es esencial, ya que influye en la complejidad del robot y los componentes que se van a utilizar. Por lo tanto, se debe empezar con un diseño sencillo que utilice componentes asequibles. A medida que se adquiere más experiencia y habilidades, se puede pasar progresivamente a robots más complicados que utilizan diseños complejos y componentes caros.
Además, el propósito previsto del robot es otro factor que se debe considerar al seleccionar un robot controlado por Arduino. Esto es importante porque guiará el diseño, las características y las funcionalidades del robot. Por lo tanto, si se quiere utilizar el robot para fines educativos, un diseño sencillo que sea fácilmente modificable y programable es la mejor opción. Por otro lado, si se pretende utilizar para la investigación o aplicaciones prácticas, entonces un robot más sofisticado con sensores y capacidades avanzadas será ideal. También se debe considerar la modularidad y la capacidad de ampliación del robot. Esto permitirá al usuario realizar modificaciones y actualizaciones a medida que se pongan a disposición nuevos componentes y tecnologías.
Además, la disponibilidad de los componentes necesarios para la selección es esencial para asegurarse de que estén fácilmente disponibles. Esto es importante porque ayudará a evitar retrasos en los proyectos y frustraciones causadas por la falta de disponibilidad de piezas críticas. El nivel de habilidad deseado es también un factor importante que se debe considerar al elegir un robot controlado por Arduino. Los principiantes necesitarán un robot fácil de construir con interfaces de programación fáciles de usar. Sin embargo, aquellos con más experiencia pueden manejar diseños más complejos que utilizan programación avanzada.
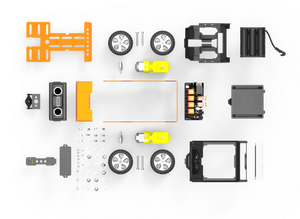
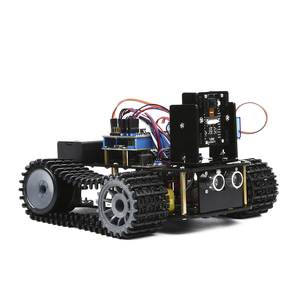
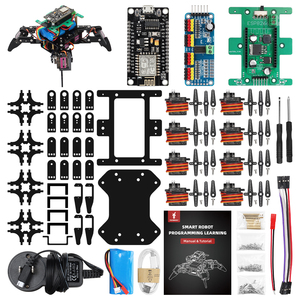
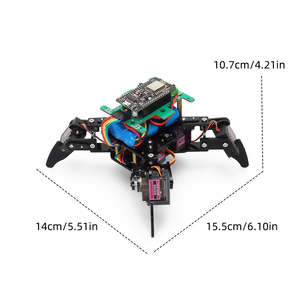
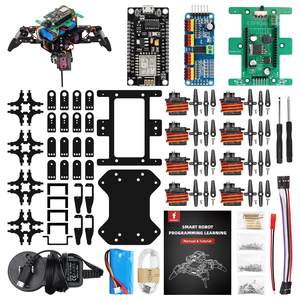
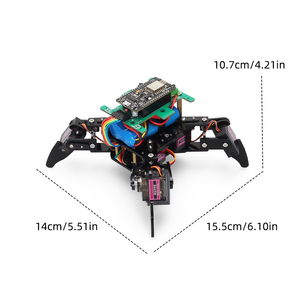
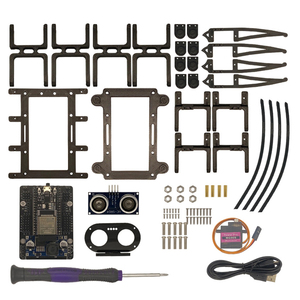
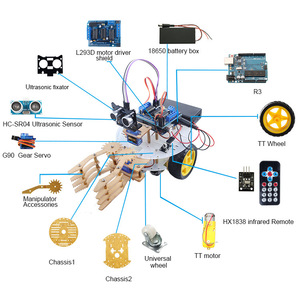
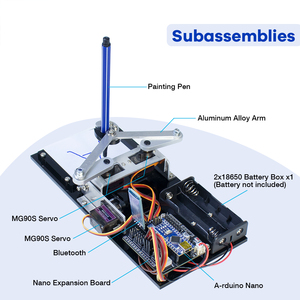
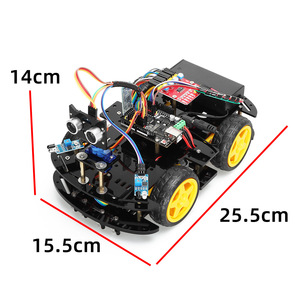
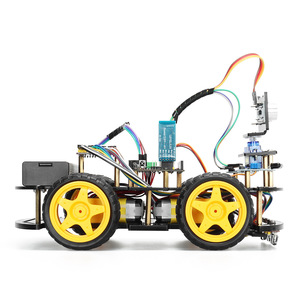
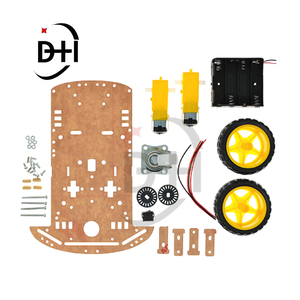
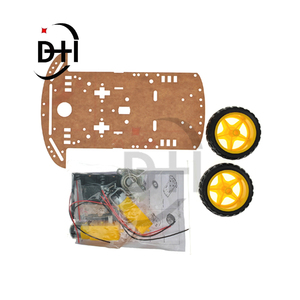
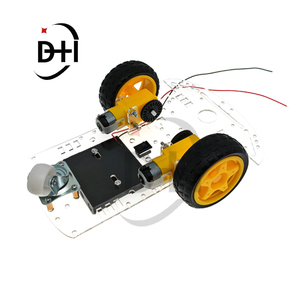
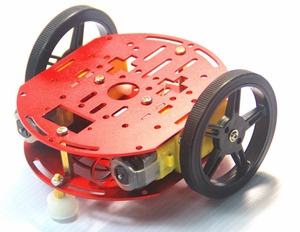
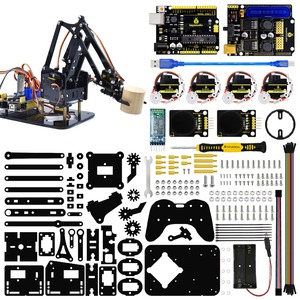
El diseño de los robots basados en Arduino es versátil y adaptable, hecho para acomodar varias configuraciones y aplicaciones. El diseño suele constar de un chasis o marco que ofrece soporte y estructura. Este chasis puede fabricarse con diferentes materiales como extrusiones de aluminio, plástico o incluso componentes impresos en 3D. Además, se incorporan ruedas o patas en el diseño para facilitar el movimiento.
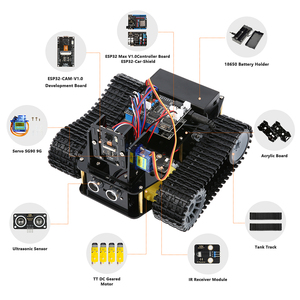
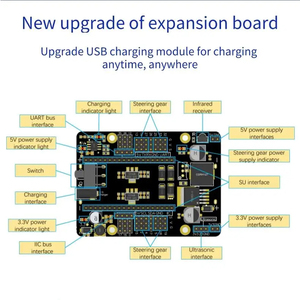
Además, la fuente de alimentación es una característica esencial en el diseño que tiene un gran impacto en el funcionamiento del robot. Consiste principalmente en baterías o módulos de alimentación utilizados para energizar todo el sistema. Para un mejor control del dispositivo robótico, se incorporan motores y controladores de motores en el diseño. Estos componentes son responsables de ejecutar movimientos basados en las órdenes recibidas del microcontrolador.
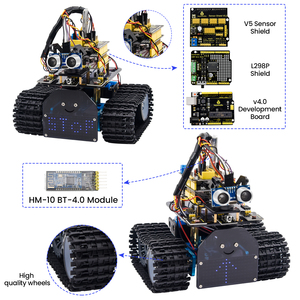
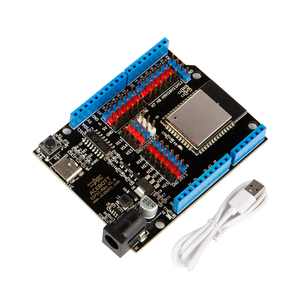
Además, las unidades de control y procesamiento son características vitales en el diseño que aseguran que todo el sistema funcione sin problemas. El microcontrolador actúa como el cerebro del robot y es responsable de tomar decisiones y enviar órdenes a otros componentes. Además, las placas Arduino, como Arduino Mega, Arduino Nano y Arduino Uno, se utilizan normalmente en este caso. Además, los sensores son una parte integral del diseño, ya que proporcionan al robot la capacidad de detectar y responder a su entorno.
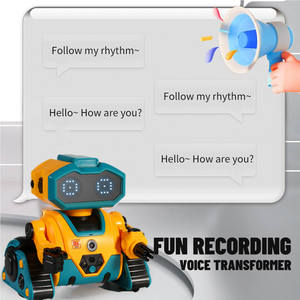
Además, el diseño se ve reforzado por la inclusión de diversas características en función de la aplicación prevista. Por ejemplo, los módulos de comunicación como Bluetooth y Wi-Fi son importantes, ya que permiten al robot conectarse con otros dispositivos y permiten el control remoto y la transferencia de datos.
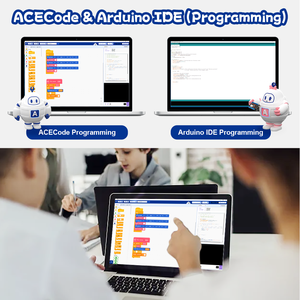
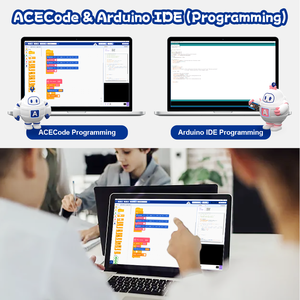
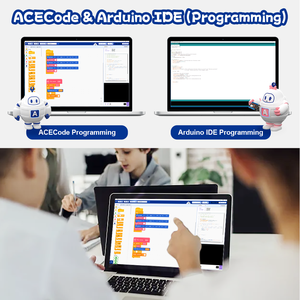
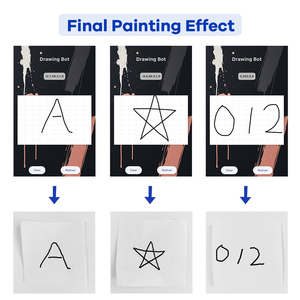
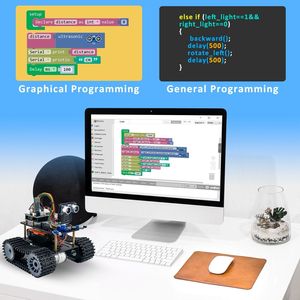
La funcionalidad de los robots basados en Arduino es altamente variable, lo que depende de las características incluidas y la complejidad del diseño. Estos robots pueden programarse para llevar a cabo una amplia gama de tareas como el seguimiento de líneas, la evitación de obstáculos y el control remoto. Además, el uso de Arduino facilita la programación de estos robots y la hace accesible, lo que permite la personalización y la flexibilidad en términos de funcionalidad.
Al trabajar con robots controlados por Arduino, es crucial priorizar la seguridad para evitar accidentes y daños en el equipo. Estas son algunas precauciones de seguridad clave:
Seguridad de la alimentación:
Antes de realizar cualquier conexión o desconexión, asegúrese de que la alimentación esté apagada. Esto incluye desenchufar la placa Arduino y apagar la alimentación del robot. Al trabajar en el laboratorio, utilice baja tensión y corriente para evitar descargas eléctricas y cortocircuitos.
Espacio de trabajo despejado:
Mantenga un espacio de trabajo limpio y organizado. Retire cualquier objeto innecesario de la mesa de trabajo y guarde las herramientas en sus lugares apropiados. Esto ayuda a prevenir accidentes y daños en el equipo.
Uso de equipo de protección:
Utilice el equipo de protección adecuado, como gafas de seguridad, guantes y batas de laboratorio, para protegerse de posibles riesgos. Esto incluye objetos afilados, productos químicos y riesgos eléctricos.
Siga las instrucciones:
Siga las instrucciones y directrices del fabricante para el uso de Arduino y los componentes asociados. Esto incluye la programación, el cableado y el montaje. Utilizar los componentes de acuerdo con sus especificaciones ayuda a prevenir accidentes y daños en el equipo.
Al evaluar la calidad de los robots controlados por Arduino, varios factores clave contribuyen a su rendimiento general, funcionalidad y fiabilidad. Estos son algunos elementos importantes a considerar:
Personalización:
Los robots controlados por Arduino ofrecen un alto grado de personalización. Esto permite a los usuarios adaptar el diseño y la funcionalidad de acuerdo con los requisitos específicos del proyecto. La naturaleza de código abierto de Arduino permite modificaciones y adaptaciones tanto de los componentes de hardware como de software.
Rentabilidad:
Las placas y componentes Arduino son generalmente asequibles, lo que los convierte en una opción económica para construir robots. Esta rentabilidad se extiende a varios sensores, actuadores y módulos que se pueden integrar fácilmente en sistemas robóticos.
Versatilidad:
La tecnología Arduino es versátil. Se puede aplicar a una amplia gama de aplicaciones robóticas. Ya sea un simple robot seguidor de líneas, un complejo robot humanoide o un asistente doméstico automatizado, Arduino ofrece la flexibilidad para abordar diversas iniciativas robóticas.
Soporte de la comunidad:
La comunidad Arduino es extensa y solidaria. Proporciona una gran cantidad de recursos, tutoriales y proyectos de ejemplo para ayudar a los constructores de robots. Este soporte impulsado por la comunidad fomenta la colaboración, el intercambio de conocimientos y la disponibilidad de soluciones a los desafíos comunes que se encuentran durante el desarrollo robótico.
P1. ¿Cuáles son las ventajas de utilizar Arduino para controlar un robot?
R1. Utilizar Arduino para controlar un robot tiene varias ventajas. En primer lugar, es una plataforma económica. En segundo lugar, es fácil de usar y muy flexible. Con Arduino, se puede modificar fácilmente el código y el hardware, haciendo los cambios necesarios para mejorar el rendimiento del robot. Además, admite varios sensores y módulos, lo que permite crear robots con múltiples funcionalidades. Además, hay muchos recursos en línea y una gran comunidad que ofrece ayuda y apoyo a los usuarios de Arduino.
P2. ¿Qué tipo de robot se puede construir con Arduino?
R2. Se pueden construir varios robots con Arduino, como robots seguidores de líneas, que utilizan un sensor particular para seguir una línea de colores contrastantes. También se pueden crear robots que evitan obstáculos utilizando Arduino. Estos robots utilizan sensores para detectar obstáculos y navegar alrededor de ellos. Además, Arduino se puede utilizar para crear robots controlados por remoto que pueden operarse a través de Bluetooth o Wi-Fi. Por último, Arduino puede controlar robots autónomos que combinan varios sensores y algoritmos para moverse y funcionar sin intervención humana.
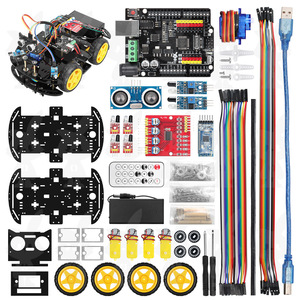
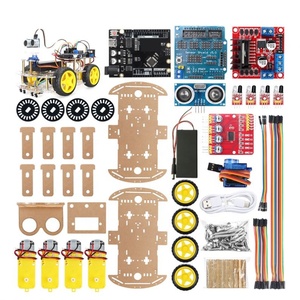
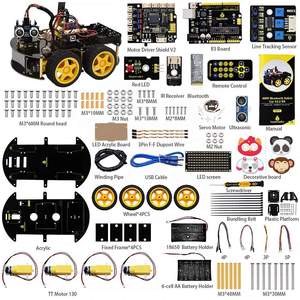
P3. ¿Qué componentes se necesitan para controlar un robot utilizando Arduino?
R3. Se necesitan varios componentes para controlar un robot utilizando Arduino. Estos incluyen la placa Arduino, que sirve como cerebro del robot, y un chasis, que es el cuerpo del robot. Además, se necesitan ruedas y motores para el movimiento. Además, se necesitan escudos o módulos de control de motor para controlar la dirección y la velocidad del motor. Las fuentes de alimentación, como las baterías, también son esenciales para el funcionamiento del robot. Por último, se necesitan varios sensores, dependiendo del propósito previsto del robot, para detectar elementos ambientales.