










































Tipos de Sistemas de Sensores Visuales
Un sistema de sensores visuales es una tecnología sofisticada que utiliza sensores para capturar y procesar datos visuales como imágenes o videos. Estos sistemas se utilizan ampliamente en diversos campos, incluyendo robótica, automoción, seguridad, salud y automatización industrial. Comprender los diferentes tipos de sistemas de sensores visuales ayuda a seleccionar la solución más adecuada para aplicaciones específicas.
Sensores de Imagen
Los sensores de imagen actúan como el componente principal en las cámaras digitales y los dispositivos de imagen al convertir la información óptica en señales eléctricas. Las dos tecnologías principales utilizadas son CCD (Dispositivo de Carga Acoplada) y CMOS (Semiconductor de Óxido Metálico Complementario).
Ventajas
- Alta calidad de imagen con bajo ruido (CCD)
- Diseño de bajo consumo de energía (CMOS)
- Integración de circuitos de procesamiento adicionales en el mismo chip (CMOS)
- Producción masiva rentable (CMOS)
Limitaciones
- Mayor consumo de energía (CCD)
- Fabricación más compleja (CCD)
- Calidad de imagen ligeramente inferior en ciertas condiciones (CMOS)
- Puede requerir calibración adicional (CCD)
Ideal para: Fotografía digital, imagen médica, cámaras de teléfonos inteligentes e inspección industrial
Sensores de Profundidad
Los sensores de profundidad permiten que las máquinas perciban entornos tridimensionales midiendo la distancia entre el sensor y los objetos. Las técnicas comunes incluyen el Tiempo de Vuelo, la Visión Estéreo y los métodos de Luz Estructurada.
Ventajas
- Capacidades precisas de mapeo 3D
- Cálculo de profundidad en tiempo real
- Admite el reconocimiento de gestos y el seguimiento de objetos
- Útil en aplicaciones de realidad aumentada (RA)
Limitaciones
- El rendimiento puede verse afectado por la luz ambiental
- Mayor costo en comparación con los sensores de imagen estándar
- Se requieren algoritmos complejos para el procesamiento de datos
- Precisión limitada en distancias extremas
Ideal para: Navegación robótica, vehículos autónomos, reconocimiento facial, RA/RV y escaneo 3D
Sensores Térmicos
Los sensores térmicos detectan la radiación infrarroja emitida por los objetos para crear imágenes basadas en las diferencias de temperatura. Estos sensores son particularmente útiles en entornos con poca luz o sin luz donde fallan los sensores ópticos tradicionales.
Ventajas
- Funciona en completa oscuridad
- Eficaz para detectar firmas de calor
- Se utiliza para la medición de temperatura sin contacto
- Esencial para la vigilancia y la supervisión de la seguridad
Limitaciones
- Resolución espacial inferior a la de los sensores de luz visible
- Mayor costo debido a componentes especializados
- Información visual menos detallada
- Puede verse afectado por factores ambientales como la humedad
Ideal para: Visión nocturna, monitoreo térmico industrial, diagnóstico de edificios y sistemas de seguridad
Sensores Basados en Eventos
También conocidos como sensores neuromórficos, los sensores basados en eventos imitan los sistemas de visión biológica al capturar cambios en la escena visual en lugar de fotogramas completos a intervalos fijos. Este enfoque asincrónico reduce significativamente la redundancia de datos y aumenta la eficiencia.
Ventajas
- Respuesta de latencia ultrabaja
- Alto rango dinámico y resolución temporal
- Bajo consumo de energía
- Ideal para la detección de movimiento de alta velocidad
Limitaciones
- Requiere hardware/software de procesamiento especializado
- No es compatible con los pipelines de procesamiento de imágenes tradicionales
- Ecosistema menos maduro en comparación con los sensores convencionales
- Desafiante interpretar datos de eventos sin procesar
Ideal para: Drones autónomos, robótica, análisis deportivos y aplicaciones de seguimiento en tiempo real
| Tipo | Característica Clave | Caso de Uso Principal | Fortaleza | Limitación |
|---|---|---|---|---|
| Sensores de Imagen | Captura datos visuales usando CCD o CMOS | Fotografía digital, grabación de video | Captura de imágenes de alta calidad | Funcionamiento dependiente de la luz |
| Sensores de Profundidad | Mide la distancia para crear mapas 3D | Robótica, RA/RV, vehículos autónomos | Percepción 3D y conciencia espacial | Mayor costo y complejidad |
| Sensores Térmicos | Imágenes basadas en firmas de calor | Visión nocturna, monitoreo industrial | Funciona en total oscuridad | Visuales de menor resolución |
| Sensores Basados en Eventos | Detección asincrónica de cambios a nivel de píxel | Seguimiento de objetos en movimiento rápido | Baja latencia y respuesta ultrarrápida | Requisitos de procesamiento especializado |
Consejo de Experto: Al elegir un sistema de sensores visuales para su aplicación, considere no solo el tipo de datos visuales que necesita, sino también las condiciones ambientales, las capacidades de procesamiento y la complejidad de la integración. Por ejemplo, los sensores térmicos sobresalen en escenarios de poca luz, mientras que los sensores basados en eventos ofrecen un rendimiento inigualable en entornos de ritmo rápido.
Especificaciones y Mantenimiento de Sistemas de Sensores Visuales
Especificaciones Técnicas Clave a Considerar
Los sistemas de sensores visuales son componentes críticos en los vehículos modernos, proporcionando datos en tiempo real para las funciones de asistencia al conductor y las capacidades de conducción autónoma. Comprender sus especificaciones técnicas es esencial para un rendimiento óptimo:
Requisitos de Alimentación
Los sistemas de sensores visuales normalmente obtienen energía de la red eléctrica del vehículo, funcionando dentro de un rango de voltaje de 5 a 12 voltios DC. Este diseño de bajo voltaje garantiza la compatibilidad con los sistemas eléctricos estándar de los automóviles, a la vez que minimiza el consumo de energía.
Durante tareas de procesamiento intensivo u operaciones de imagen de alta resolución, estos sistemas pueden experimentar picos temporales en la demanda de energía. Una protección adecuada del circuito y una regulación estable del voltaje son cruciales para evitar la degradación del rendimiento o la falla de los componentes durante estas cargas máximas.
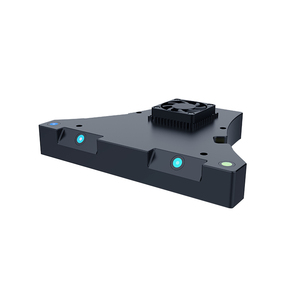
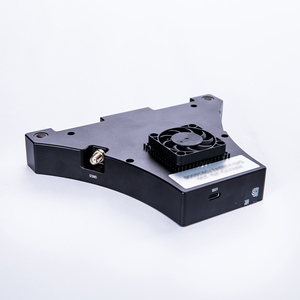
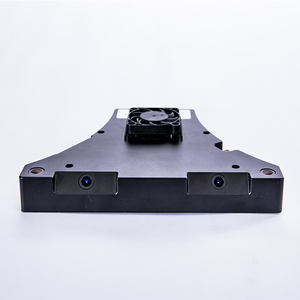
Unidad de Procesamiento de Datos (DPU)
La Unidad de Procesamiento de Datos sirve como el centro de procesamiento principal para los sistemas de sensores visuales, responsable de interpretar los datos de imagen bruta capturados por los sensores. Ejecuta complejos algoritmos de visión artificial que permiten el reconocimiento de objetos, el cálculo de distancias y la creación de mapas ambientales.
Estas unidades a menudo cuentan con procesadores dedicados optimizados para tareas de computación paralela, como GPU o aceleradores de IA especializados. Debido a su intensidad computacional, las UPU requieren sistemas eficientes de gestión térmica para mantener temperaturas de funcionamiento óptimas durante el uso continuo.
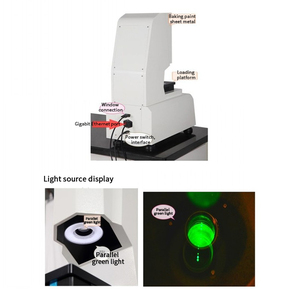
Interfaces de Comunicación
Los sistemas de sensores visuales modernos utilizan protocolos de comunicación automotriz estandarizados para intercambiar datos con otros sistemas del vehículo. Las interfaces comunes incluyen el bus de red de área de controlador (CAN) para la transmisión de datos básicos y Gigabit Ethernet para aplicaciones de transmisión de video de alta velocidad.
La elección del protocolo de comunicación afecta la latencia de los datos y la capacidad de ancho de banda, lo que afecta directamente la capacidad de respuesta del sistema y su capacidad para procesar información en tiempo real sin cuellos de botella o pérdida de fotogramas.
Resolución y Claridad del Sensor
La resolución del sensor afecta significativamente la capacidad del sistema para detectar e interpretar la información visual con precisión. Los sensores de mayor resolución proporcionan un mayor reconocimiento de detalles, permitiendo una clasificación de objetos y una medición de distancias más precisas.
Las opciones de resolución dependen de los requisitos específicos de la aplicación: los sistemas de vigilancia de gran angular pueden priorizar la cobertura del campo sobre la densidad de píxeles, mientras que los sistemas de prevención de colisiones frontales se benefician de una mayor resolución para un análisis detallado de los objetos.
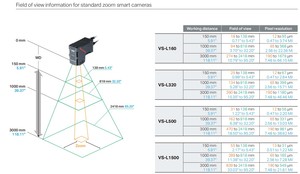
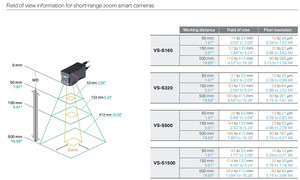
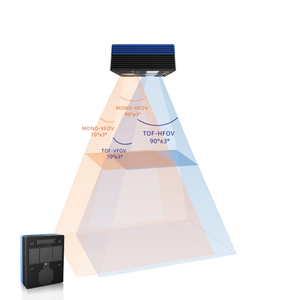
Características del Campo de Visión (FOV)
Los sistemas de sensores visuales vienen con diferentes especificaciones de campo de visión que determinan su área de cobertura espacial. Las lentes de gran angular (120°-180°) sobresalen en la monitorización de carriles adyacentes y puntos ciegos, lo que las hace ideales para la asistencia de estacionamiento y la detección de cambio de carril.
Las configuraciones de campo de visión más estrechas (30°-60°) se centran en las capacidades de detección de largo alcance, particularmente valiosas para el control de crucero adaptativo y los sistemas de advertencia de colisión frontal, donde la medición precisa de la distancia es crítica.
Adaptabilidad a la Iluminación
Los sistemas de sensores visuales avanzados incorporan tecnologías sofisticadas de adaptación a la luz para mantener la funcionalidad en diversas condiciones de iluminación. Esto incluye la compresión del rango dinámico para manejar variaciones extremas de brillo y algoritmos de mejora de poca luz para una mejor visibilidad en la oscuridad.
Algunos sistemas integran fuentes de iluminación activa como LED infrarrojos para complementar las condiciones de iluminación natural, asegurando un funcionamiento fiable incluso en la oscuridad total, a la vez que se mantiene el cumplimiento de las normas de seguridad vial.
| Especificación | Nivel de Criticidad | Pautas de Selección |
|---|---|---|
| Rango Dinámico | Alto | Valores más altos (100 dB+) garantizan un mejor rendimiento en transiciones de iluminación desafiantes, como las salidas de túneles |
| Frecuencia de fotogramas | Alto | 30 fps mínimo para funciones básicas; 60 fps+ recomendado para aplicaciones de alta velocidad |
| Clasificación ambiental | Medio | La certificación IP67 proporciona una protección adecuada contra el polvo y la entrada de agua para la mayoría de las aplicaciones |
| Precisión del color | Medio | Importante para sistemas de reconocimiento de semáforos y detección de señales |
| Flexibilidad de montaje | Alto | Los soportes ajustables permiten una calibración y optimización de la alineación precisas |
Prácticas de Mantenimiento Integral
El mantenimiento de los sistemas de sensores visuales es crucial para preservar su precisión, fiabilidad y funciones de seguridad crítica. La implementación de procedimientos de mantenimiento adecuados garantiza un rendimiento constante:
Importante: Al realizar cualquier mantenimiento que afecte a la posición del sensor o a las superficies de montaje, vuelva a calibrar siempre todo el conjunto del sensor visual de acuerdo con las especificaciones del fabricante. De no hacerlo, se pueden crear condiciones operativas peligrosas debido a la detección incorrecta de objetos y a los cálculos de distancia.
Cómo elegir un sistema de sensor visual
Seleccionar el sistema de sensor visual adecuado requiere una cuidadosa consideración de varios factores técnicos y ambientales para asegurar un rendimiento óptimo en diversas aplicaciones, tales como la fabricación, la seguridad, la automatización o el control de calidad. Esta guía explora los criterios clave que influyen en su elección y proporciona información práctica para tomar una decisión informada.
Requisitos de la aplicación
La función principal del sistema de sensor visual determina sus capacidades requeridas. Los sistemas utilizados en la fabricación de precisión pueden necesitar imágenes de alta resolución para la detección de defectos, mientras que los sistemas desplegados para vigilancia pueden priorizar una amplia cobertura del campo de visión.
- Los sistemas de inspección de calidad a menudo requieren una resolución submicrométrica para detectar imperfecciones superficiales
- Las aplicaciones de guiado robótico se benefician de altas velocidades de fotogramas y un reconocimiento preciso de objetos
- Los sistemas de seguridad pueden centrarse en el rendimiento con poca luz y las capacidades de detección de movimiento
Consideración clave: Siempre alinee las especificaciones del sistema con las tareas exactas que debe realizar.
Resolución de imagen
La resolución se refiere al número de píxeles que un sensor puede capturar, lo que afecta directamente a la claridad y el detalle de la imagen. Las resoluciones más altas permiten inspecciones más precisas, pero también aumentan las demandas de procesamiento de datos y los requisitos de almacenamiento.
- VGA (640x480) es suficiente para comprobaciones básicas de presencia/ausencia
- 1-2 megapíxeles son comunes para mediciones dimensionales e inspección general
- Las aplicaciones de alta gama, como la inspección de semiconductores, pueden requerir sensores de más de 10 megapíxeles
Consejo de medición: Calcule la densidad de píxeles requerida en función de las necesidades de detección del tamaño mínimo de la característica
Velocidad de fotogramas y velocidad
La velocidad de fotogramas determina cuántas imágenes por segundo puede capturar y procesar el sistema. Las aplicaciones de alta velocidad, como la inspección web o las líneas de envasado, requieren altas velocidades de fotogramas para mantener la precisión sin introducir desenfoque de movimiento.
- Los sistemas de visión artificial estándar funcionan a 30-60 fps
- La inspección de alta velocidad puede requerir capacidades de 200-1000+ fps
- Considere la sincronización con la velocidad de la línea de producción para obtener resultados consistentes
Impacto en el rendimiento: Las velocidades de fotogramas más rápidas suelen reducir la resolución disponible debido a las limitaciones de ancho de banda
Condiciones de iluminación e iluminación
Una iluminación adecuada es crucial para una calidad de imagen consistente y un rendimiento fiable del sistema. Considere tanto las condiciones ambientales como si se necesitará iluminación adicional para mejorar el contraste y la visibilidad.
- Las luces de cúpula proporcionan una iluminación difusa uniforme para la mayoría de las tareas de inspección
- Las retroiluminaciones crean siluetas fuertes para la medición dimensional
- La iluminación infrarroja funciona bien para la visión nocturna o a través de materiales translúcidos
- La iluminación estroboscópica se sincroniza con procesos de alta velocidad para obtener imágenes nítidas
Consideración clave: Haga coincidir la longitud de onda de la iluminación con la sensibilidad del sensor para un contraste óptimo
Campo de visión y selección de lentes
El campo de visión define el área capturada por el sensor, determinada por la elección de la lente y el tamaño del sensor. La selección de la lente adecuada garantiza que el sistema capture todos los detalles necesarios mientras mantiene una resolución adecuada en toda la distancia de trabajo.
- Las lentes de distancia focal fija funcionan mejor para distancias de inspección constantes
- Las lentes zoom permiten flexibilidad para múltiples áreas de inspección
- Las lentes telecéntricas minimizan la distorsión para la metrología de precisión
- Las lentes gran angular cubren áreas grandes, pero pueden sacrificar la resolución de los bordes
Consejo técnico: Calcule la distancia de trabajo usando la fórmula: WD = (FOV × tamaño del sensor) / (tamaño del objeto)
Consideraciones ambientales
El entorno operativo influye significativamente en la longevidad y la fiabilidad del sistema. El polvo, la humedad, las temperaturas extremas y las vibraciones pueden afectar al rendimiento si no se tienen en cuenta adecuadamente durante la selección.
- Las carcasas con clasificación IP65 protegen contra el polvo y las salpicaduras de agua
- Los componentes de grado industrial soportan temperaturas de -20 °C a +70 °C
- Los soportes antivibraciones evitan la tensión mecánica en los componentes sensibles
- Carcasas resistentes a la corrosión para entornos con exposición a productos químicos
Consejo de instalación: Las pruebas ambientales antes de la implementación ayudan a identificar posibles problemas
Capacidades de procesamiento
La capacidad de procesamiento de imágenes determina la rapidez con la que el sistema puede analizar las imágenes capturadas y tomar decisiones. Los procesadores integrados ofrecen soluciones compactas, mientras que los PC externos ofrecen mayor flexibilidad y capacidad de actualización.
- Las cámaras inteligentes integran el sensor y el procesador en una sola unidad
- Los sistemas basados en FPGA permiten el procesamiento paralelo para el análisis en tiempo real
- Las plataformas con aceleración de GPU manejan algoritmos complejos de visión artificial con IA
- Los sistemas conectados a la nube permiten la gestión y el análisis centralizados de datos
Factor de rendimiento: El tiempo de procesamiento debe ser inferior al tiempo de ciclo para el funcionamiento en tiempo real
Integración y compatibilidad
Una implementación exitosa depende de la integración perfecta con los sistemas existentes. Evalúe los protocolos de comunicación, la compatibilidad del software y la facilidad de conexión con otros equipos de sus instalaciones.
- GigE Vision y USB3 Vision son interfaces industriales estándar
- Modbus TCP y PROFINET admiten protocolos de automatización industrial
- Los SDK abiertos permiten el desarrollo de aplicaciones personalizadas
- La compatibilidad con PLC y HMI simplifica el control de la línea de producción
Planificación del sistema: Considere la expansión futura al seleccionar los tipos y capacidades de la interfaz
Consejo de selección: Al elegir entre opciones similares, considere no solo las necesidades actuales, sino también los posibles requisitos futuros. Una inversión ligeramente mayor en potencia de procesamiento o capacidad de expansión hoy puede ahorrar costos significativos más adelante al actualizar su sistema. Siempre solicite unidades de demostración o pruebas de concepto antes de comprometerse con compras a gran escala.
| Tipo de aplicación | Resolución recomendada | Velocidad de fotogramas mínima | Tipo de iluminación ideal | Requisito de procesamiento |
|---|---|---|---|---|
| Detección básica de presencia | VGA (640x480) | 30 fps | Luz de cúpula | Procesador integrado |
| Medición dimensional | 1-2 MP | 60 fps | Luz de anillo | Procesamiento basado en FPGA |
| Inspección de superficies | 5-10 MP | 120 fps | Retroiluminación difusa | Aceleración de GPU |
| Clasificación de alta velocidad | 2-5 MP | 200+ fps | Iluminación estroboscópica | Procesamiento distribuido |
| Inspección de semiconductores | 10+ MP | Variable | Iluminación coaxial | Clúster de computación de alto rendimiento |
Guía de instalación y reemplazo DIY para sistemas de sensores visuales
Instalar o reemplazar un sistema de sensores visuales en su vehículo puede mejorar significativamente la seguridad y la conciencia mientras conduce. Ya sea que esté actualizando un sistema existente o reemplazando uno defectuoso, esta guía completa lo guiará paso a paso a través de todo el proceso, garantizando una instalación exitosa.
Advertencia de seguridad: Siempre desconecte la batería del vehículo antes de comenzar cualquier trabajo eléctrico para evitar cortocircuitos o daños a la electrónica de su vehículo. Asegúrese de que el vehículo esté estacionado en un terreno nivelado con el freno de estacionamiento activado.
Proceso de instalación y reemplazo paso a paso
- Preparación y planificación
- Retire cuidadosamente el sistema de sensores visuales antiguo, anotando cómo están conectados los componentes.
- Desempaquete el nuevo sistema y verifique que se incluyan todos los componentes (cámaras, unidad de visualización, arnés de cableado, hardware de montaje).
- Lea atentamente el manual del usuario para comprender los requisitos de instalación específicos de su modelo.
- Asegúrese de que la batería del vehículo esté completamente cargada y funcione correctamente antes de comenzar la instalación.
- Reúna las herramientas necesarias, incluyendo destornilladores, pelacables, bridas y artículos de limpieza.
- Montaje de las cámaras
- Identifique la ubicación óptima de la cámara según lo recomendado por el fabricante; normalmente, el parachoques delantero, el área de la placa de matrícula trasera y los espejos laterales.
- Limpie a fondo todas las superficies de montaje con alcohol isopropílico para asegurar una adhesión adecuada.
- Utilice los tornillos o almohadillas adhesivas proporcionadas para montar de forma segura cada cámara.
- Para los montajes adhesivos, presione firmemente y mantenga durante al menos 30 segundos para crear un enlace sólido.
- Angule las cámaras adecuadamente para capturar el máximo campo de visión sin obstrucciones.
- Conexión de la unidad de visualización
- Busque una posición adecuada para la unidad de visualización que no obstruya la vista del conductor.
- Conecte la unidad de visualización a los sensores visuales utilizando los cables proporcionados, asegurando conexiones seguras.
- Pase los cables a lo largo de las vías de fábrica o debajo de los paneles de revestimiento para mantener una apariencia limpia.
- Asegure los cables sueltos con bridas para evitar daños por vibraciones e interferencias con los pedales.
- Conecte la unidad de visualización a la fuente de alimentación del vehículo siguiendo el diagrama de cableado del manual.
- Encienda la unidad de visualización para verificar que recibe alimentación y detecta los sensores conectados.
- Conexión de los sensores
- Ajuste cada sensor a su cable correspondiente según la ubicación (delantero, trasero, izquierdo, derecho).
- Conecte los conectores asegurándose de que encajen en su lugar y se bloqueen de forma segura.
- Envuelva los puntos de conexión con cinta aislante o tubo termorretráctil para mayor protección contra la humedad.
- Pruebe cada conexión comprobando la intensidad de la señal en la unidad de visualización.
- Calibración del sistema
- Siga el procedimiento de calibración específico que se describe en el manual del usuario.
- Esto puede implicar ajustar los ángulos de la cámara, configurar líneas de referencia o introducir las dimensiones del vehículo.
- Algunos sistemas requieren que el vehículo esté estacionado en un terreno nivelado durante la calibración.
- Complete la secuencia de calibración completa para asegurar la detección precisa de objetos y el cálculo de la distancia.
- Prueba final
- Realice una inspección visual completa para asegurarse de que todos los componentes estén montados de forma segura y correctamente conectados.
- Arranque el vehículo y pruebe el sistema en diversas condiciones (luz del día, poca luz, diferentes velocidades).
- Verifique que todas las funciones funcionen correctamente, incluida la detección de ángulo muerto, las guías de estacionamiento y el cambio entre vistas.
- Compruebe la resistencia al agua rociando ligeramente agua en las carcasas de las cámaras si corresponde.
- Solución de problemas comunes
- Si el sistema no se enciende, compruebe los fusibles, las conexiones de alimentación y los puntos de conexión a tierra.
- Para una mala calidad de vídeo, inspeccione las lentes de la cámara para detectar suciedad y verifique que las conexiones de los cables estén seguras.
- Si no se detectan los sensores, vuelva a comprobar la alineación del conector y consulte la sección de solución de problemas del manual.
- Vuelva a calibrar el sistema si las imágenes mostradas parecen distorsionadas o desalineadas.
- Consulte foros en línea o póngase en contacto con el servicio de atención al cliente si los problemas persisten después de la solución de problemas básica.
| Fase de instalación | Consideraciones clave | Posibles problemas | Herramientas recomendadas |
|---|---|---|---|
| Preparación | Verificación de componentes, revisión del manual, configuración del espacio de trabajo | Piezas faltantes, sistema incompatible, planificación inadecuada | Manual del usuario, juego de herramientas, multímetro |
| Montaje de la cámara | Preparación de la superficie, fijación segura, posicionamiento adecuado | Montaje flojo, ángulos incorrectos, vistas obstruidas | Destornilladores, toallitas con alcohol, nivel |
| Cableado | Enrutamiento adecuado, conexiones seguras, cableado organizado | Cables pellizcados, conexiones sueltas, cables enredados | Bridas, conducto de cables, herramienta de crimpado |
| Integración del sistema | Conexión de alimentación, prueba de señal, calibración | Voltaje incorrecto, señal deficiente, calibración incorrecta | Voltímetro, probador de pantalla, herramientas de alineación |
Consejo profesional: Al enrutar los cables, siga las rutas de cableado de fábrica existentes siempre que sea posible para mantener una instalación limpia y reducir el riesgo de rozaduras o pellizcos. Utilice ojales de espuma al pasar los cables a través de los orificios para proteger el aislamiento del cableado.
Preguntas Frecuentes sobre Sistemas de Sensores Visuales
Sí, los sistemas de sensores visuales son absolutamente dignos de consideración, especialmente en entornos donde los datos visuales precisos juegan un papel crítico en la automatización, la seguridad y la toma de decisiones. Estos sistemas se utilizan ampliamente en industrias como la fabricación, la automotriz, la salud, la agricultura y la seguridad. Su valor es particularmente evidente cuando ayudan a reducir el error humano, aumentar la eficiencia operativa o permitir operaciones autónomas. Por ejemplo, en robótica, los sensores visuales permiten a las máquinas navegar por entornos complejos y realizar tareas precisas como el reconocimiento y la clasificación de objetos.
Si bien la inversión inicial puede ser significativa dependiendo de la complejidad del sistema, los beneficios a largo plazo a menudo justifican el costo a través de una mayor productividad, una reducción de las necesidades de mano de obra y una mayor precisión.
La vida útil de los sistemas de sensores visuales varía significativamente según varios factores clave:
- Tipo de sensor: Los sensores visuales de alta gama para uso industrial suelen durar más (7–10 años) que los modelos de consumo (3–5 años).
- Condiciones ambientales: La exposición a temperaturas extremas, humedad, polvo o vibraciones puede acortar la vida útil de los componentes sensibles.
- Intensidad de uso: El funcionamiento continuo bajo cargas de trabajo pesadas puede provocar un desgaste más rápido en comparación con el uso intermitente.
- Mantenimiento: La limpieza regular, las actualizaciones de software y la calibración adecuada pueden prolongar la vida útil y el rendimiento del sistema.
Muchos sistemas de sensores visuales modernos vienen con diseños modulares que permiten la sustitución de componentes en lugar de actualizaciones completas del sistema, lo que prolonga aún más su vida útil.
Sí, los sistemas de sensores visuales se pueden utilizar para la visión nocturna mediante la incorporación de tecnologías especializadas como la imagen infrarroja (IR) o la detección térmica. Estas capacidades les permiten funcionar eficazmente en condiciones de poca luz o sin luz:
- Sensores infrarrojos (IR): Utilizan iluminación IR activa para capturar imágenes en la oscuridad, que se encuentran comúnmente en cámaras de vigilancia y sistemas de visión nocturna para automóviles.
- Sensores de imágenes térmicas: Detectan las firmas de calor emitidas por los objetos, lo que los hace ideales para aplicaciones como la seguridad perimetral, el monitoreo de la vida silvestre y el reconocimiento militar.
Estos sistemas se integran cada vez más en vehículos autónomos, drones y soluciones de seguridad para el hogar inteligente para proporcionar datos visuales fiables independientemente de las condiciones de iluminación. Los avances en la tecnología de sensores continúan mejorando la resolución, la sensibilidad y la asequibilidad de los sistemas visuales con capacidad de visión nocturna.