All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(682 productos disponibles)






 Ready to Ship
Ready to Ship






 Ready to Ship
Ready to Ship
 Ready to Ship
Ready to Ship



 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship


























































 Ready to Ship
Ready to Ship













 Ready to Ship
Ready to Ship






































 Ready to Ship
Ready to Ship


 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship











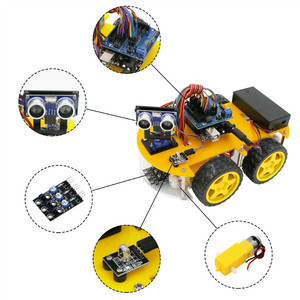
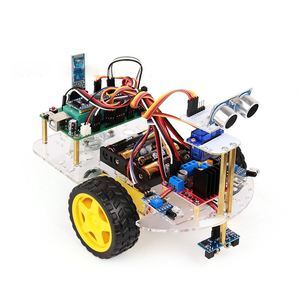
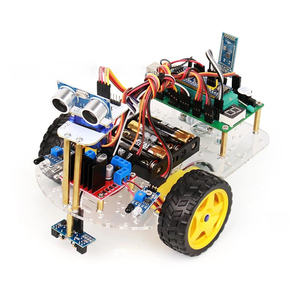
Los servomotores digitales se han convertido en un elemento fundamental en la robótica y la mecatrónica impulsada por Arduino debido a su precisión, control y confiabilidad. Se utilizan en diversas aplicaciones, incluida la automatización, el control remoto y el modelado. La versatilidad y el rendimiento de los servomotores digitales se mejoran cuando se integran con Arduino, una plataforma electrónica de código abierto popular. Esta combinación permite a aficionados, ingenieros y entusiastas crear intrincados sistemas robóticos con movimientos y controles precisos.
Los servomotores digitales compatibles con Arduino están disponibles en diferentes tipos, cada uno ofreciendo características y capacidades distintas para adaptarse a diversas aplicaciones y requisitos de proyectos. Comprender los diferentes tipos de servomotores digitales Arduino es esencial para seleccionar el adecuado para un propósito específico. Estos tipos de servomotores digitales robóticos Arduino incluyen los siguientes:
Servomotor digital estándar
Los servomotores digitales estándar se utilizan comúnmente para proyectos de Arduino. Estos tipos de servomotores digitales robóticos Arduino ofrecen un rendimiento confiable y una potencia moderada. Tienen un tamaño estándar y un rango de movimiento de 180 grados. Son ideales para principiantes y aplicaciones que no requieren alta precisión o funciones avanzadas. Los servomotores estándar son asequibles y fáciles de encontrar; por lo tanto, son excelentes para comenzar proyectos basados en Arduino.
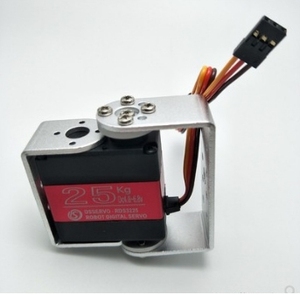
Servomotor digital de engranajes metálicos
Estos servomotores digitales de engranajes metálicos pueden manejar más par y son más duraderos que los servomotores estándar. Son ideales para usar en aplicaciones que requieren alta precisión y uso continuo. Los servomotores están equipados con engranajes metálicos que mejoran su resistencia y longevidad. Esto los hace adecuados para tareas exigentes como la robótica, los vehículos RC y las impresoras 3D.
Servomotor digital mini y micro
Los servomotores digitales mini y micro son de tamaño pequeño y livianos. Son adecuados para proyectos que tienen limitaciones de tamaño y peso. Su rendimiento es bueno a pesar de su pequeño tamaño y brindan un rango de movimiento limitado. Estos tipos de servomotores digitales robóticos Arduino son ideales para aplicaciones como drones, teléfonos móviles y coches RC.
Servomotor digital de alto par
Estos servomotores digitales están diseñados para ofrecer un alto nivel de potencia en un formato compacto. Son adecuados para aplicaciones que requieren altos niveles de precisión y potencia. Son ideales para usar en robots, impresoras 3D y máquinas CNC.
Servomotor digital de rotación continua
Los servomotores digitales de rotación continua son útiles para aplicaciones que requieren rotación continua. A diferencia de los servomotores estándar, que tienen un rango de movimiento limitado, los servomotores de rotación continua pueden girar 360 grados continuamente. Esto los hace ideales para aplicaciones como cintas transportadoras, robots y máquinas expendedoras. Estos tipos de servomotores digitales robóticos Arduino tienen un potenciómetro que controla la dirección y la velocidad de la rotación.
Servomotor digital inteligente
Los servomotores digitales inteligentes son tipos avanzados de servomotores con sensores y procesadores integrados. Se pueden programar para realizar ciertas tareas de forma independiente. Son ideales para usar en robots y sistemas de automatización que requieren un alto nivel de automatización e inteligencia.
Par y fuerza
El par y la fuerza del servomotor afectan cuánto peso puede soportar y cuánta carga puede manejar. El par es la fuerza de rotación producida por el motor. Determina el peso que el motor puede levantar o empujar. Se mide en kg/cm o kg/m. El par se calcula por cuánto peso puede levantar el servomotor a una cierta distancia del eje de rotación. Por ejemplo, si un servomotor puede levantar 1 kg a 20 cm, su par es 1 kg/cm.
El par es importante cuando el robot tiene que transportar mucho peso o subir cuesta arriba. Un servomotor con alto par puede funcionar bien bajo alta presión sin sobrecalentarse o averiarse. Por el contrario, un servomotor de bajo par es mejor cuando el robot tiene que levantar objetos livianos o moverse sobre una superficie lisa.
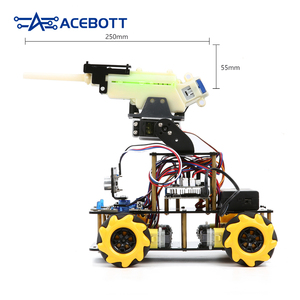
Tamaño y peso
El tamaño y el peso del servomotor afectan cómo se puede usar. Un servomotor más grande significa que el robot también será grande. Un ejemplo es cuando se utiliza un servomotor MG996R. Debido a su tamaño y peso, no es una buena opción para robots pequeños. Por otro lado, el uso de un micro servomotor hace que el robot sea más pequeño y ligero. Esto se debe a que los micro servomotores son compactos y livianos. Por lo tanto, el tipo de robot determina el tamaño y el peso del servomotor.
Velocidad y rango de movimiento
La velocidad es la rapidez con la que puede girar el motor del servomotor. Determina la rapidez con la que se moverá el robot. El rango de movimiento es la distancia que puede girar el motor del servomotor. La mayoría de los motores de servomotor solo pueden girar 180 grados. Sin embargo, algunos pueden girar un círculo completo (360 grados) o más (como los servomotores de rotación continua). Además, algunos pueden tener un rango de 270 grados.
Un servomotor con alta velocidad y amplio rango de movimiento hace que el robot se mueva rápido y realice tareas rápidamente. Por otro lado, un servomotor lento con un rango de movimiento limitado hará que el robot se mueva lentamente.
Control y programación
El control y la programación son importantes cuando se utilizan motores de servomotor robóticos con Arduino. Esto se debe a que el tipo de control afecta el funcionamiento del servomotor. Un servomotor estándar necesita una simple señal PWM para controlar su posición. Sin embargo, un servomotor de rotación continua necesita una codificación diferente para controlar su velocidad y dirección. Además, un servomotor inteligente tiene sensores integrados que requieren aplicaciones especiales para la programación.
Control de velocidad
Con la ayuda de Arduino, se puede controlar la velocidad de los motores de servomotor. Esto se hace ajustando la duración del pulso enviado para regular la posición del motor. Esto es importante cuando se realizan tareas repetitivas como ensamblar o desensamblar piezas en un lugar determinado.
Control de posición
Arduino también se utiliza para controlar la posición del motor del servomotor. Esto es importante cuando se necesita la ubicación exacta, por ejemplo, cuando el brazo del robot se extiende para agarrar un objeto.
Automatización
Usando Arduino, se puede crear automatización con la ayuda de motores de servomotor para controlar varios dispositivos y maquinaria. Esto es importante para los electrodomésticos y los equipos industriales.
Versatilidad
Los servomotores robóticos basados en Arduino son versátiles y se pueden utilizar en diferentes aplicaciones, incluida la robótica, la automatización y el control remoto. Esto les permite adaptarse a diversas tareas y proyectos.
Programabilidad
Estos servomotores robóticos son programables, y esto permite al usuario configurar comandos y rutinas específicas que deben seguirse. Esto es importante ya que permite la personalización y la flexibilidad en el control del motor del servomotor.
Modularidad
Los servomotores robóticos basados en Arduino son altamente modulares. Esto significa que se pueden integrar fácilmente en diferentes sistemas y estructuras. También permiten expansiones y modificaciones.
Compacto y ligero
Los motores de servomotor robóticos son compactos y livianos. Esto les permite adaptarse fácilmente a diferentes dispositivos sin agregar ningún peso significativo.
Mecanismo de retroalimentación
La mayoría de los motores de servomotor robóticos vienen con mecanismos de retroalimentación como codificadores que garantizan la precisión en la detección de posición y esto mejora la precisión en el control.
Fuente de alimentación
Los motores de servomotor robóticos funcionan con baterías externas o fuentes de alimentación. Esto le da al motor la energía necesaria para funcionar de manera eficiente.
Cuando se trata de la seguridad y calidad del servomotor robótico Arduino, el fabricante debe considerar varios factores para garantizar que los dispositivos sean confiables y duraderos. Uno de los aspectos críticos es utilizar materiales de alta calidad en la fabricación de los servomotores y los componentes de los robots.
Los materiales de alta calidad utilizados en la fabricación de las máquinas robóticas y de servomotores pueden resistir el desgaste, aumentando así su vida útil. Además, se deben tomar medidas de seguridad durante el proceso de fabricación para evitar accidentes o lesiones causados por dispositivos defectuosos. Esto incluye realizar pruebas exhaustivas en todos los productos antes de lanzarlos al mercado para verificar si hay defectos o fallas que puedan comprometer su integridad.
Además, el cumplimiento de las normas y directrices de la industria establecidas por organizaciones como la Comisión Electrotécnica Internacional (IEC) o el Instituto de Ingenieros Eléctricos y Electrónicos (IEEE) es crucial para garantizar la seguridad y la calidad del servomotor digital robótico Arduino. Estos organismos proporcionan un marco que los fabricantes deben seguir al producir dispositivos robóticos para garantizar que cumplan con los criterios de seguridad requeridos.
Además, la certificación de organizaciones acreditadas también puede brindar una garantía sobre la calidad de los servomotores robóticos Arduino, ya que están sujetos a inspecciones y evaluaciones rigurosas durante todo el proceso de producción.
P1. ¿Es posible conectar varios servomotores a un Arduino?
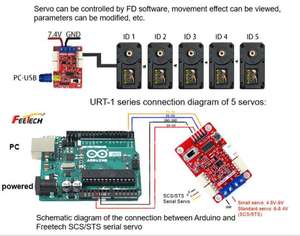
R1. Sí, es posible conectar varios servomotores a un Arduino. Sin embargo, la cantidad de servomotores que se pueden conectar depende de la cantidad de pines PWM disponibles. La conexión se realiza a través de un cable divisor Y o conectando cada cable del servomotor individualmente al Arduino.
P2. ¿Cuál es la vida útil de un servomotor robótico?
R2. La vida útil de un servomotor robótico está determinada por varios factores, como el uso, el mantenimiento y el entorno. Si un servomotor se utiliza bajo cargas pesadas o en entornos hostiles, es probable que se desgaste rápidamente.
P3. ¿Se puede utilizar un servomotor digital con un Arduino?
R3. Sí, un servomotor digital se puede utilizar con un Arduino. De hecho, los Arduinos se utilizan comúnmente para controlar servomotores digitales.