All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1201 productos disponibles)








 Ready to Ship
Ready to Ship

















 Ready to Ship
Ready to Ship



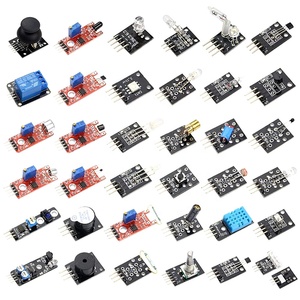
Los tipos de sensores de robots son una parte integral de la vida cotidiana. Los sensores se encuentran incorporados en teléfonos móviles, electrodomésticos modernos y, por supuesto, en robots. Los sensores de robots vienen en varios tipos, cada uno diseñado para detectar condiciones físicas específicas y percibir el entorno de manera diferente. Aquí hay algunos tipos comunes de sensores de robots:
Los fabricantes de sensores robóticos proporcionan especificaciones detalladas para ayudar a los usuarios a comprender sus capacidades y limitaciones. A continuación se presentan algunas de las especificaciones de los tipos de sensores de robots.
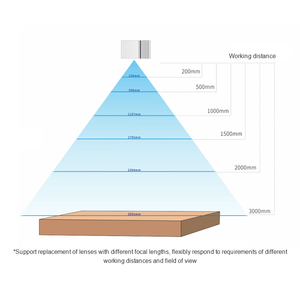
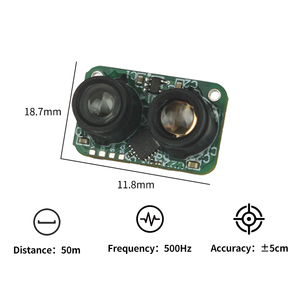
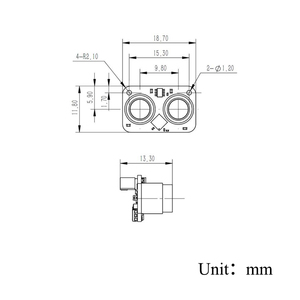
Alcance
Cada sensor tiene una distancia mínima y máxima en la que puede detectar un objeto. El alcance es una especificación crítica para todos los tipos de sensores de robots. Ayuda al usuario a comprender los límites operativos del sensor.
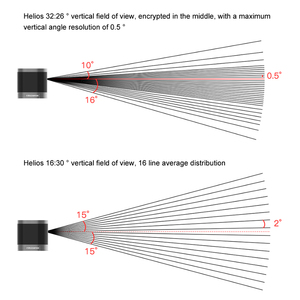
Resolución
La resolución se refiere al cambio más pequeño que un sensor puede detectar. Por ejemplo, un sensor de temperatura con alta resolución puede detectar e informar incluso diferencias de temperatura menores. En sensores visuales como cámaras, la resolución se expresa en píxeles.
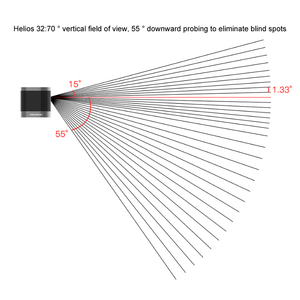
Campo de visión
El campo de visión es aplicable a sensores visuales como cámaras. Es la extensión del entorno observable que un sensor puede detectar a la vez. El campo de visión se mide en grados. Afecta la capacidad de la cámara para monitorear un área más amplia. Una cámara con un campo de visión más amplio puede cubrir un área mayor que una con un campo de visión estrecho.
Precisión
Cada sensor tiene un margen de error. La especificación de precisión mostrará el grado de variación respecto al valor real que el sensor puede medir. Por ejemplo, un sensor de presión podría tener una precisión de ±1psi. Esto significa que puede medir la presión con una variación de una libra por pulgada cuadrada respecto al valor verdadero.
Respuesta de frecuencia
La respuesta de frecuencia es una especificación para sensores que miden señales con variaciones en el tiempo. Indica la capacidad del sensor para detectar y responder a diferentes frecuencias de la señal que se mide. Por ejemplo, un micrófono con buena respuesta de frecuencia puede captar frecuencias sonoras altas y bajas.
Latencia
La latencia es el tiempo que tarda un sensor en procesar datos y enviarlos al controlador del robot. Una alta latencia puede ralentizar el tiempo de respuesta y afectar el rendimiento del robot. Por ejemplo, en vehículos autónomos, la latencia del sensor puede retrasar al robot en la toma de decisiones críticas de conducción.
Durabilidad
La durabilidad es la capacidad del sensor para soportar condiciones ambientales adversas, como temperaturas extremas, polvo, humedad y exposición a productos químicos. Por ejemplo, un sensor resistente a la intemperie puede funcionar en condiciones húmedas y húmedas sin sufrir daños.
Consumo de energía
El consumo de energía es una especificación crítica para robots alimentados por batería. Mide la cantidad de energía que el sensor utiliza para funcionar. Los sensores con bajo consumo de energía son ideales para aplicaciones donde se requiere una larga vida útil de la batería.
A continuación se presentan algunas prácticas generales de mantenimiento para los sensores de robots.
Limpieza regular
La limpieza regular ayuda a eliminar el polvo y los residuos acumulados en los sensores. Por ejemplo, la suciedad en los sensores ópticos puede interferir con su capacidad para detectar luz y reducir su eficiencia. Utilice los materiales y métodos de limpieza recomendados para evitar daños en el sensor durante la limpieza.
Calibración
La calibración asegura que los sensores mantengan su precisión a lo largo del tiempo. Siga las instrucciones del fabricante sobre cómo calibrar los sensores. Algunos sensores requieren calibración después de un período específico o después de haber sido utilizados en diferentes condiciones ambientales.
Inspección
La inspección regular implica verificar visualmente los sensores en busca de signos de daño, desgaste o deterioro. Esté atento a conexiones sueltas, grietas y entrada de humedad. Reemplace o repare cualquier sensor dañado de inmediato para mantener el rendimiento óptimo del robot.
Actualizaciones de software
Algunos sensores requieren actualizaciones de software periódicas para mejorar su rendimiento y confiabilidad. Siga las instrucciones del fabricante sobre cómo realizar actualizaciones de software. Utilice solo las herramientas y métodos de actualización recomendados.
Consideraciones ambientales
Las condiciones ambientales donde operan los sensores afectan su vida útil y rendimiento. Proteja los sensores de temperaturas extremas, humedad, polvo y otras condiciones adversas que superen sus límites especificados. Instale enclosures de protección como cubiertas y carcasas para prevenir daños en los sensores por factores ambientales.
Al seleccionar los sensores adecuados para un robot, hay varios factores a considerar:
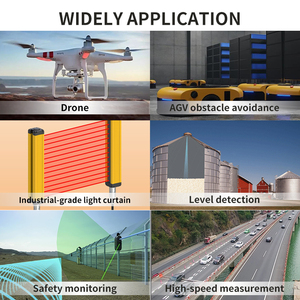
Considere la aplicación
¿Cuál es el propósito del robot? Por ejemplo, ¿es para uso industrial, servicio o investigación? Diferentes aplicaciones pueden requerir diferentes capacidades de detección.
Condiciones ambientales
¿Cuáles son las condiciones ambientales donde operará el robot? Por ejemplo, ¿hay temperaturas extremas, humedad o polvo? Es esencial seleccionar sensores que puedan resistir estas condiciones.
Fusión de sensores
A veces, utilizar múltiples sensores de diferentes tipos puede proporcionar capacidades de detección más completas. Esto se conoce como fusión de sensores. Es esencial considerar las capacidades de procesamiento e integración disponibles del robot.
Costo y complejidad
Los sensores más avanzados pueden ser costosos y agregar complejidad al robot. Es esencial equilibrar las capacidades de detección con el costo y la complejidad según las necesidades del robot.
Los sensores de robots son un componente crucial de cualquier robot, por lo que es necesario tener un entendimiento básico de ellos. Aunque no se recomienda intentar ninguna reparación o reemplazo de sensores de robots sin las habilidades necesarias, es posible reemplazar algunos tipos de sensores de robots, como reemplazar un sensor de luz básico (LDR) o un sensor de proximidad de uso general (IR) como el PixyCam.
Antes de intentar reemplazar cualquier sensor de robot, asegúrese de tener las herramientas necesarias disponibles. Esto incluye un soldador y soldadura, bomba de desoldar, cortadores de alambre y destornilladores. También es útil tener un conocimiento básico de electrónica y programación.
Para reemplazar un sensor de robot, primero apague el robot. Abra la carcasa del robot para exponer los sensores. Retire cuidadosamente el sensor viejo desoldándolo de la placa de circuito utilizando una bomba de desoldar. Conecte el nuevo sensor a la placa de circuito utilizando el soldador y la soldadura. Luego, verifique que el sensor funcione correctamente encendiendo el robot y probando su funcionalidad. Después de la prueba, cierre la carcasa del robot.
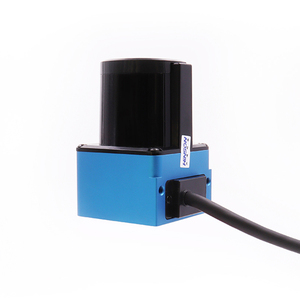
Con esta sencilla guía, reemplazar tipos de sensores de robots que no sean demasiado complejos es factible. Para sensores más complejos como LiDAR o sistemas basados en cámaras, es mejor consultar la documentación del fabricante o buscar ayuda profesional.
Q1: ¿Cuáles son las diferencias entre sensores IR activos y pasivos?
A1: Los sensores IR activos emiten radiación infrarroja y esperan señales que reboten, mientras que los sensores IR pasivos solo detectan la radiación infrarroja emitida por objetos sin emitir la suya propia.
Q2: ¿Cuál es el papel de los sensores de robots en la automatización?
A2: Los sensores de robots en la automatización ayudan a detectar cambios en el entorno, permitiendo que los robots tomen decisiones informadas y realicen tareas con precisión y seguridad.
Q3: ¿Pueden los robots tener sentidos parecidos a los humanos?
A3: No, pero están equipados con sensores que imitan los sentidos humanos, como el tacto, la vista y el sonido, para interactuar con el entorno.
Q4: ¿Qué es un robot basado en sensores?
A4: Un robot basado en sensores es un robot equipado con sensores que le permiten percibir su entorno y responder a cambios en ese entorno.























 Ready to Ship
Ready to Ship
































































 Ready to Ship
Ready to Ship




























 Ready to Ship
Ready to Ship