All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(634 productos disponibles)




 Ready to Ship
Ready to Ship












 Ready to Ship
Ready to Ship








































 Ready to Ship
Ready to Ship


 Ready to Ship
Ready to Ship

















































 Ready to Ship
Ready to Ship







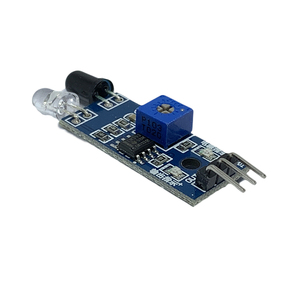



































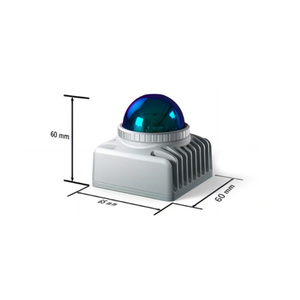
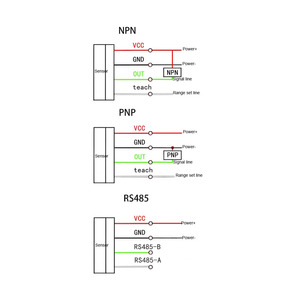
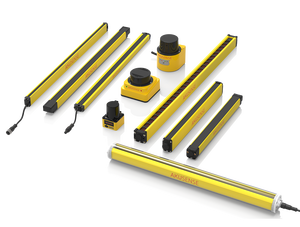
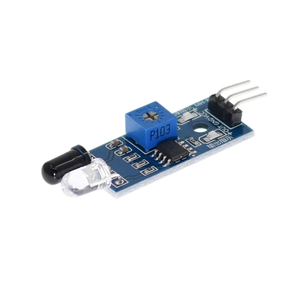
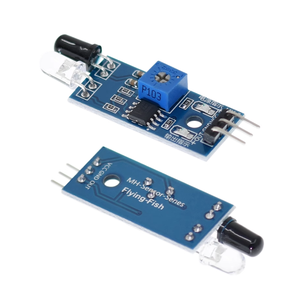
Los sensores de detección de obstáculos robóticos están diseñados para detectar obstáculos en el entorno para fines de navegación y seguridad. Los sensores utilizan diferentes tecnologías para lograr esto, y como tal, existen diferentes tipos de sensores de detección de obstáculos, que incluyen;
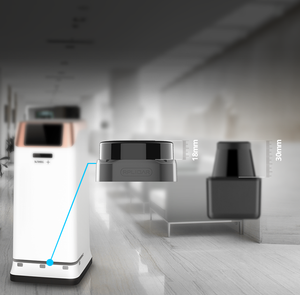
Los sensores robóticos son dispositivos que permiten a los robots percibir su entorno. Esto incluye ser consciente de su ubicación, reconocer objetos y obstáculos, y detectar cambios en el entorno. Estas capacidades permiten a los robots navegar de manera efectiva, evitar colisiones y tomar decisiones informadas en función del contexto circundante.
Los sensores robóticos son cruciales para el sistema de detección de obstáculos. Sin sensores, los robots funcionarían a ciegas, lo que aumentaría el riesgo de accidentes y colisiones. Con los sensores, los robots pueden detectar y evitar obstáculos, asegurando un funcionamiento seguro y confiable en diversas tareas y entornos.
Los sensores de detección de obstáculos robóticos tienen requisitos de mantenimiento específicos para garantizar un rendimiento y una confiabilidad óptimos. Estos son algunos requisitos generales de mantenimiento:
Al seguir estos requisitos de mantenimiento, los usuarios pueden garantizar que los sensores de detección de obstáculos funcionen de manera óptima y mejoren la seguridad y la confiabilidad de los sistemas robóticos.
Elegir los sensores de detección de obstáculos adecuados para los robots es crucial para garantizar un rendimiento y una seguridad óptimos. Estos son algunos factores a considerar al elegir cualquiera de los tipos de sensores:
Entorno y aplicación
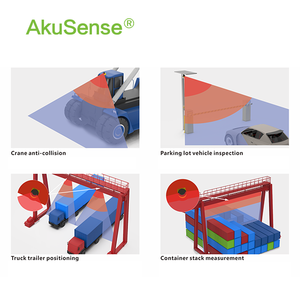
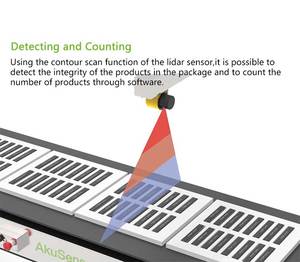
Considere el entorno donde operará el robot. Los diferentes entornos (interiores, exteriores, abarrotados o espacios abiertos) presentan desafíos y obstáculos distintos. Por ejemplo, los sensores LIDAR son adecuados para entornos exteriores con distancias y velocidades variables. En contraste, los sensores ultrasónicos son rentables para aplicaciones interiores con rangos limitados.
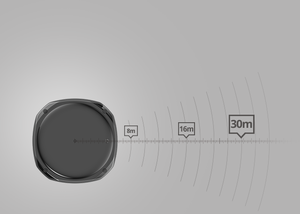
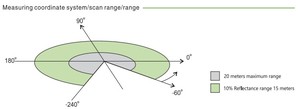
Rango de detección y campo de visión
Evalúe el rango de detección requerido y el campo de visión del robot. Algunas aplicaciones necesitan sensores con un rango largo para detectar obstáculos lejos, mientras que otras requieren detección de corto alcance para la navegación de cerca. Además, considere el campo de visión (FOV) de los sensores. Un FOV más amplio puede detectar múltiples obstáculos simultáneamente, pero puede reducir la resolución general del sensor.
Tamaño y velocidad del obstáculo
Considere el tamaño y el tipo de obstáculos que el robot puede encontrar. Para aplicaciones que involucran obstáculos pequeños y de movimiento rápido, se necesitan sensores de alta resolución con capacidades de detección precisas. En contraste, se requiere menos precisión al tratar con obstáculos más grandes y lentos (por ejemplo, muebles o personas).
Fusión de sensores y redundancia
Piense en el uso de múltiples sensores para combinar sus fortalezas. La fusión de sensores (combinación de datos de varios sensores) proporciona una detección de obstáculos más confiable y completa. Además, el uso de sensores redundantes puede mejorar la seguridad al proporcionar sistemas de detección de respaldo.
Costo y complejidad
Los sensores de vehículos robóticos varían en costo y complejidad. Los sensores de alta gama brindan funciones avanzadas pero pueden ser costosos y requieren una integración compleja. Considere el presupuesto del proyecto y la complejidad del sensor requerido con respecto a la calibración, el procesamiento de datos y la integración con el sistema de control del robot.
Robustez ambiental
Considere las condiciones ambientales donde operará el robot. Algunos sensores son más adecuados para temperaturas extremas, humedad o exposición al polvo que otros. Elegir sensores diseñados para las condiciones ambientales específicas asegura un rendimiento confiable y una larga vida útil.
Consumo de energía
Considere el consumo de energía de los sensores, especialmente para los robots alimentados por baterías. Seleccionar sensores de bajo consumo ayuda a prolongar la duración de la batería y la eficiencia operativa general.
Integración y compatibilidad
Asegúrese de que los sensores elegidos sean compatibles con los sistemas existentes del robot, como el sistema de control, los protocolos de comunicación y las capacidades de procesamiento. Considere la facilidad de integrar los sensores en el diseño del robot y si se requieren componentes adicionales (por ejemplo, procesamiento de señales, montaje).
Resolución y precisión del sensor
La resolución y la precisión de los sensores de detección de obstáculos son consideraciones cruciales. Los sensores de mayor resolución pueden detectar obstáculos más pequeños y proporcionar información ambiental más detallada. Además, los sensores precisos reducen los falsos positivos y negativos, asegurando una detección confiable de obstáculos.
Aquí hay una guía sobre cómo hacer bricolaje y reemplazar los sensores de detección de obstáculos en la robótica:
Identifique el sensor adecuado para el robot
Esto incluye seleccionar un sensor que sea compatible con el hardware y el software del robot. Además, el sensor debe ser adecuado para el entorno operativo del robot y los requisitos de detección.
Desconecte la energía
Antes de hacer cualquier cosa, desconecte la fuente de alimentación del robot para evitar cortocircuitos y descargas eléctricas.
Retire el sensor antiguo
Esto incluye aflojar el hardware de montaje del sensor y desconectar cuidadosamente el sensor del sistema eléctrico del robot. Además, uno debe tener cuidado de no dañar los componentes del robot al retirar el sensor antiguo.
Instale el nuevo sensor
Esto incluye conectar el nuevo sensor al sistema eléctrico del robot y asegurarse de que el cableado del sensor esté enrutado de manera adecuada para evitar interferencias con las partes móviles del robot. Después de eso, el hardware de montaje del sensor se aprieta y el sensor se monta de forma segura en el robot.
Calibra el sensor
Una vez instalado el sensor de detección de obstáculos, es importante probar el sistema para asegurarse de que funcione correctamente. Esto se hace haciendo funcionar el robot en un entorno controlado donde hay obstáculos y observando el comportamiento del robot. Si el rango de detección o la sensibilidad del sensor no son los adecuados, se ajustan las configuraciones del sensor hasta que el sensor funcione como se esperaba.
P1: ¿Dónde se puede comprar un sensor robótico?
A1: Cooig.com es una plataforma para conectar proveedores con compradores comerciales, por lo que los compradores pueden ponerse en contacto con los proveedores y realizar pedidos al por mayor. La plataforma cuenta con numerosos proveedores de sensores de detección de obstáculos para varios robots.
P2: ¿Se puede personalizar un sensor de detección de obstáculos?
A2: Sí, es posible obtener sensores de detección de obstáculos personalizados. Los compradores pueden ponerse en contacto con el proveedor para consultar sobre las opciones de personalización en función de sus necesidades.
P3: ¿Cómo se deben almacenar los sensores de obstáculos robóticos?
A3: Siga las pautas del fabricante sobre cómo almacenar los sensores. Generalmente, deben almacenarse en un ambiente limpio y seco, lejos de la luz solar directa y las temperaturas extremas.