Tipos de controladores de microstepping
La importancia de un **controlador de microstepping** proviene de la precisión que puede proporcionar al controlar los microsteps que se dan cuando el motor gira. Esto es importante en muchas aplicaciones industriales porque los ángulos y el movimiento del motor deben controlarse con gran precisión y en incrementos muy pequeños.
Los diferentes tipos de controladores de microstepping tienen como objetivo lograr el mismo objetivo fundamental de control de movimiento suave. Sin embargo, difieren en diseño, implementación y aplicación:
- Sistema de control de bucle abierto: Este tipo de sistema de control puede recibir información que no se altera de sistemas externos. El sistema no interactúa con el entorno externo, y no se utilizan sensores o instrumentos de medición para obtener datos sobre el estado del sistema. Este tipo de sistema de control se utiliza cuando la salida del sistema y las variables controladas no necesitan medirse para un control eficaz, o cuando su medición es demasiado costosa.
- Sistema de control de bucle cerrado: A diferencia del sistema de control de bucle abierto, un sistema de control de bucle cerrado utiliza retroalimentación de una salida para controlar la entrada. La salida de un sistema se redirige de vuelta a la entrada, y este bucle de salida a través de esta interfaz de retroalimentación controla la variable reguladora. Este tipo de controlador de microstepping puede proporcionar mayor eficiencia y confiabilidad.
- Sistema de control analógico: Un sistema de control analógico se basa en cantidades físicas continuamente variables. En palabras simples, el controlador controlará el sistema utilizando una señal de control continua. Por ejemplo, cuando se gira el volante de un automóvil, el automóvil gira en la dirección de la rueda de manera continua. Este tipo de sistema de control se puede utilizar para controlar procesos que cambian continuamente, como velocidad, temperatura, presión, etc.
- Sistema de control digital: Un sistema de control digital regula las variables en los sistemas utilizando computadoras digitales. Las muestras digitalizadas de las variables de salida del sistema se procesan para controlar el sistema. Las variables de control como la presión o la temperatura que pueden cambiar continuamente se miden y se convierten en cantidades digitales. Luego, los controladores digitales tomarán decisiones basadas en algoritmos de control y aplicarán señales de control para controlar la variable en cuestión.
- Sistemas de control PID: Los sistemas de control Proporcional-Integral-Derivativo (PID) tienen como objetivo modular continuamente una variable de control para mantener otra variable en un punto de ajuste deseado controlando el sistema.
Funciones y características
Funciones de los controladores de microstepping
Un controlador de microstepping para motor paso a paso está diseñado para controlar motores paso a paso con pasos más finos en aplicaciones de microcontroladores. Los siguientes beneficios se pueden obtener al utilizar controladores de microstepping en aplicaciones motorizadas:
- Control más suave y preciso: Las aplicaciones de microcontroladores requieren una operación del motor precisa y suave para lograr precisión en el movimiento. Un controlador de microstepping logra un mejor control del motor al subdividir cada paso en incrementos más pequeños. Esto proporciona la precisión y suavidad deseadas en la aplicación.
- Reducción de la vibración del motor: La vibración del motor puede causar un mal funcionamiento de la aplicación y la máquina y resultados inexactos. Un controlador de microstepping reduce la vibración y aumenta la vida útil de la aplicación y la máquina al suavizar la operación del motor.
- Control de torque mejorado: El torque es importante en las aplicaciones y máquinas que levantan o mueven cargas pesadas. El torque de una aplicación debe controlarse y mantenerse, y los controladores de microstepping lo hacen regulando con precisión la salida del motor. El control de torque confiable permite el manejo de carga consistente y evita la sobrecarga o desestabilización del sistema.
- Uso eficiente de la energía: Los controladores de motor de microstepping optimizan la producción de torque y minimizan el consumo de energía. El uso eficiente de la energía ahorra costos operativos y reduce el desperdicio de energía. Los sistemas energéticamente eficientes pueden tener duraciones de trabajo más largas ya que se desperdicia menos energía como calor.
- Vida útil extendida del motor: La vida útil del motor se puede aumentar a través de un mejor control, una vibración reducida y un consumo de energía optimizado. Por lo tanto, los costos de reemplazo y reparación del motor se reducirán en la aplicación y el sistema.
- Confiabilidad de la máquina: Las aplicaciones de microcontroladores serán confiables ya que se reducirá la probabilidad de averías y fallas.
Características de los controladores de microstepping
Antes de invertir en un controlador de microstepping, es importante conocer sus características. Las características determinarán el rendimiento y las capacidades del controlador en el microstepping. Estas son algunas características importantes a considerar:
- Resolución de microstepping: La cantidad de microsteps por controlador de paso completo tiene un impacto significativo en la suavidad y la resolución incremental.
- Control de corriente: Esto regula la cantidad de corriente que consume el motor paso a paso para maximizar la producción de torque. La regulación de corriente adecuada permite una rotación eficaz del motor.
- Unidad de procesamiento integrada: Un controlador de microstepping basado en microcontrolador debe tener un microprocesador o microcontrolador integrado en el controlador. Esto permite un control de motor flexible, una fácil programación y una interfaz con otros componentes del sistema.
- Procesamiento de señales digitales (DSP): Los controladores que tienen capacidad de procesamiento de señales digitales pueden procesar algoritmos de control de manera efectiva. El DSP mejora la precisión del control, la capacidad de respuesta y el rendimiento del motor.
- Rango de voltaje de entrada: Esto determinará qué tan flexible y compatible es el controlador con varias fuentes de alimentación y la integración del sistema.
Escenarios
Los controladores de motor de microstepping se utilizan en numerosas aplicaciones para proporcionar un control preciso del movimiento. Estos son algunos escenarios comunes donde son útiles:
-
Mecanizado CNC
Las máquinas de control numérico (CNC) se basan en controladores de microstepping para lograr un posicionamiento preciso y un movimiento suave. Los controladores de microstepping permiten un control más fino, produciendo cortes más limpios y reduciendo el desgaste de las piezas mecánicas.
-
Impresión 3D
Las impresoras 3D utilizan motores paso a paso para una deposición precisa de polímero capa por capa. Los controladores de microstepping mejoran la precisión y la operación suave de la impresora, lo que da como resultado impresiones de alta calidad.
-
Robótica
Los controladores de motor de microstepping se utilizan ampliamente en aplicaciones robóticas que requieren un posicionamiento estable y preciso. Permite movimientos más suaves y un mejor control de brazos robóticos, robots móviles y mecanismos de servocontrol.
-
Fabricación automatizada
En entornos industriales, los sistemas de montaje y manipulación de materiales automatizados utilizan controladores de microstepping para garantizar un movimiento preciso y repetible. Desempeña un papel vital en los sistemas de transporte, máquinas de recogida y colocación y cambiadores de herramientas automatizados.
-
Equipo médico
Los dispositivos médicos como bombas de infusión, robots quirúrgicos y sistemas de imagenología dependen de los controladores de microstepping para lograr un movimiento confiable y preciso de los componentes críticos.
-
Control de bucle cerrado
El controlador de microstepping se puede integrar en sistemas de control de bucle cerrado que proporcionan retroalimentación en tiempo real sobre la posición y la velocidad del motor. Los sistemas de bucle cerrado ofrecen un rendimiento mejorado, lo que permite la corrección de errores y el control avanzado del movimiento.
-
Electrónica
El controlador de microstepping se utiliza comúnmente en pasatiempos, proyectos de bricolaje y kits de robótica educativa. Su asequibilidad lo hace adecuado para principiantes y aquellos que buscan aprender sobre el control del movimiento.
Cómo elegir controladores de microstepping
-
Asegurar la compatibilidad:
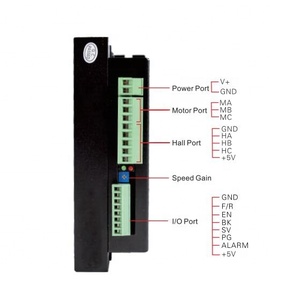
El controlador debe ser compatible con otros componentes conectados (PC, PLC, HMI) con respecto a los protocolos de comunicación (Ethernet/IP, CANopen, Profibus) e interfaces de E/S (entradas/salidas digitales/analógicas). También debe admitir las especificaciones del motor, como voltaje, corriente, resistencia, inductancia, ángulo de paso y par de retención para coincidir con la fuente de alimentación y la capacidad de paso/microstep del controlador.
-
Analizar las especificaciones de rendimiento:
Las especificaciones importantes incluyen la corriente de salida máxima para el par de retención, la frecuencia de pulso máxima para la respuesta de velocidad/aceleración, el par a bajas velocidades, la estabilidad a baja velocidad para un control preciso a bajas velocidades y la capacidad de avanzar, retroceder y revertir para perfiles de movimiento complejos.
-
Verificar la protección y la refrigeración:
La protección contra ruido eléctrico, sobrecargas de voltaje/corriente/temperatura, cortocircuitos, inversiones de la fuente de alimentación y enfriamiento por aire forzado o conductivo para la disipación de calor son importantes. Seleccione controladores que puedan soportar los niveles de temperatura, humedad, polvo, vibraciones e interferencia electromagnética del entorno operativo.
-
Evaluar la sintonización y el diagnóstico:
Los buenos controladores tienen sintonización de bucle para optimizar el control, pruebas incorporadas para verificar el funcionamiento y retroalimentación para monitorear/señales internas para solucionar problemas y optimizar el rendimiento.
-
Revisar la capacidad de carga:
Se debe considerar la cantidad de ejes y la carga máxima por eje, junto con el espacio y la ubicación para el cableado y la refrigeración. También se debe tener en cuenta la disposición de los ejes, el tipo de accionamiento (un eje/varios ejes, servo/paso a paso), el control (posición/velocidad/par), el microstepping (1-100) y el paso completo (1-1).
-
Considerar la reputación y el soporte del proveedor:
Es crucial investigar la trayectoria y la experiencia en la industria del proveedor, así como verificar la calidad y la disponibilidad de su soporte técnico y recursos. Esto incluye la documentación adecuada del producto, como manuales de usuario y hojas de datos, ofrecer un servicio al cliente receptivo para abordar las consultas de manera oportuna y validar la adhesión del proveedor a los estándares de calidad a través de certificaciones y garantías para sus productos.
P&R
P: ¿Son necesarios los controladores de microstepping para los motores paso a paso?
R: No es realmente una necesidad, pero es muy recomendable. Sin él, el motor paso a paso funciona en pasos completos; con el controlador de microstepping, el motor puede funcionar en incrementos más pequeños. Esto hace que el movimiento del motor sea más suave, y el controlador ofrece un mejor par a bajas velocidades. También ayuda a reducir el ruido mecánico del motor.
P: ¿Qué aplicaciones utilizan controladores de microstepping para motores paso a paso?
R: Muchas aplicaciones requieren el uso de controladores de microstepping para motores paso a paso. Las impresoras 3D utilizan este motor paso a paso para realizar movimientos precisos para imprimir objetos capa por capa. Las máquinas CNC también utilizan controladores de microstepping para controlar las herramientas de corte y realizar posiciones precisas. La robótica también utiliza controladores de microstepping para ayudar con el control suave y preciso de las extremidades y las articulaciones.
P: ¿Cómo seleccionar un controlador de microstepping?
R: Hay algunos factores importantes a considerar al seleccionar un controlador de microstepping. Las clasificaciones de voltaje y corriente deben coincidir con la fuente de alimentación del motor paso a paso. La cantidad de pasos del controlador influye en la suavidad y el par del motor. Asegúrese de que tenga suficientes capacidades de refrigeración.









































































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4