All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(382 productos disponibles)

 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship


 Ready to Ship
Ready to Ship
























































































 Ready to Ship
Ready to Ship














 Ready to Ship
Ready to Ship















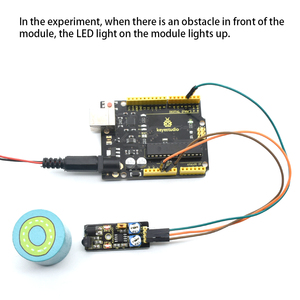
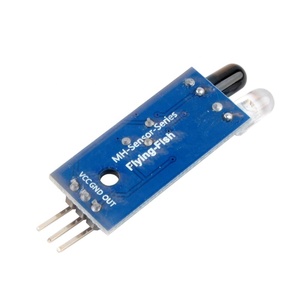
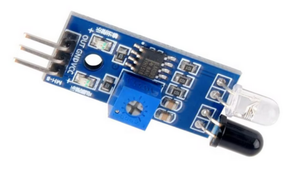
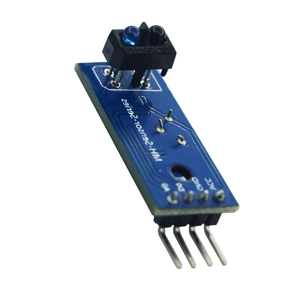
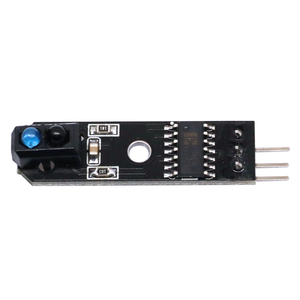
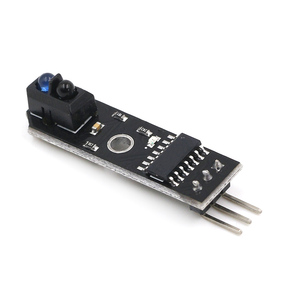
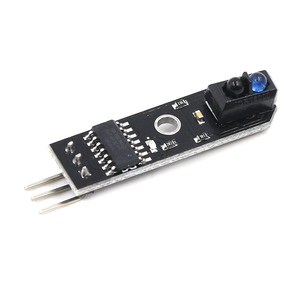
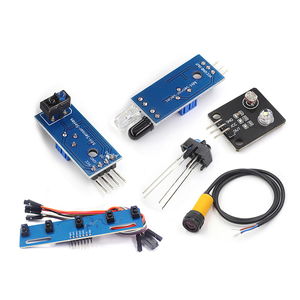
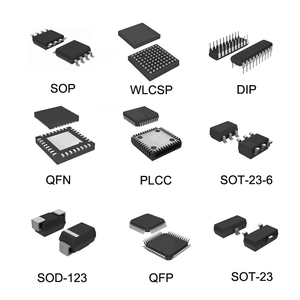
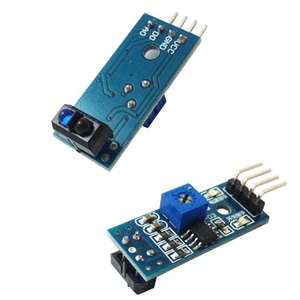
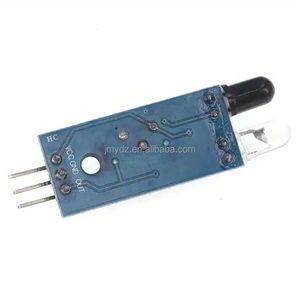
Un sensor de obstáculos Arduino es un dispositivo que ayuda a detectar obstáculos u objetos en el camino y envía una señal a la placa Arduino. Estos sensores utilizan diferentes tecnologías para detectar obstáculos, como ondas de sonido ultrasónico, luz infrarroja o rayos láser. A continuación se presentan algunos de los tipos de sensores de obstáculos Arduino:
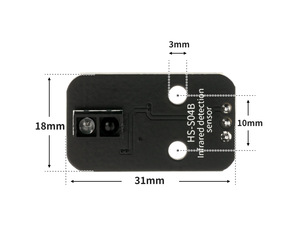
Los sensores Arduino ayudan a los creadores a evitar obstáculos en su camino. A continuación se presentan las especificaciones del sensor de obstáculos Arduino.
Con estas especificaciones, el sensor de obstáculos Arduino puede detectar obstáculos en su camino y evitarlos.
Como todos los dispositivos electrónicos, los sensores de obstáculos Arduino se degradan con el tiempo. Esto hace que sean menos efectivos en la detección de obstáculos. Por lo tanto, mantén el sensor de obstáculos Arduino para prolongar su vida útil y efectividad. A continuación se presentan algunos consejos de mantenimiento:
Antes de realizar sus pedidos, los compradores de sensores Arduino deben entender las características y especificaciones de estos sensores. A continuación se presentan algunos factores a considerar al elegir un sensor de obstáculos Arduino.
Rango de Detección
Diferentes sensores tienen diferentes rangos de detección. Elige un sensor con un rango de detección adecuado para el proyecto previsto. Por ejemplo, utiliza un sensor con un largo rango de detección al desarrollar un modelo de coche autónomo. Un largo rango de detección permite que el coche detecte y evite obstáculos mucho antes de alcanzarlos.
Ángulo de Detección
Considera el ángulo de detección del sensor. Algunos sensores tienen un ángulo de detección más amplio que otros. Un sensor con un ángulo de detección más amplio puede detectar obstáculos que están directamente adelante y aquellos que están ligeramente de lado. Es una opción adecuada para proyectos donde el sensor necesita detectar obstáculos en múltiples direcciones.
Velocidad de Respuesta
Considera la velocidad de respuesta del sensor. ¿Qué tan rápido detectará el sensor un obstáculo y enviará una señal? Esta característica es crucial para los sensores utilizados en robótica. En robótica, una velocidad de respuesta lenta puede resultar en accidentes, ya que el robot podría no detectar el obstáculo a tiempo y chocar con él.
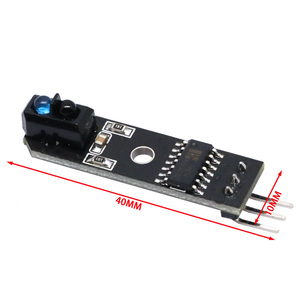
Tamaño y Forma
El tamaño y la forma del sensor son críticos para proyectos con restricciones de peso y espacio. Por ejemplo, evita usar sensores grandes en drones, ya que agregarán peso al drone y ocuparán mucho espacio.
Requisitos de Voltaje y Energía
Diferentes sensores de obstáculos Arduino tienen diferentes requisitos de voltaje y energía. Elige un sensor que sea compatible con la fuente de alimentación disponible.
Temperatura y Condiciones Ambientales
Considera las condiciones ambientales y la temperatura del entorno donde se utilizará el sensor. Algunos sensores están diseñados para soportar condiciones climáticas adversas, como calor o frío extremo. Tales sensores son adecuados para proyectos que se utilizarán al aire libre.
Facilidad de Uso
Algunos sensores son fáciles de usar y vienen con instrucciones detalladas y bibliotecas para Arduino. Estos sensores son adecuados para principiantes. Los sensores más avanzados son adecuados para usuarios experimentados.
Costo
Los sensores de obstáculos para Arduino vienen en diferentes rangos de precios. Establece un presupuesto antes de elegir un sensor. Además, considera la relación calidad-precio. No comprometas la calidad.
Reemplazar el sensor Arduino es muy fácil. Solo requiere algunas herramientas y algo de conocimiento de programación. A continuación se presentan algunas de las herramientas que podría necesitar para reemplazar o instalar un nuevo sensor de obstáculos Arduino.
A continuación se presentan los pasos a seguir para reemplazar el sensor de obstáculos Arduino:
Q1: ¿Qué es un Sensor de Obstáculos Arduino?
A1: Un sensor de obstáculos Arduino es un dispositivo utilizado con sistemas basados en Arduino para detectar obstáculos y medir distancias. Estos sensores pueden ayudar a prevenir colisiones en robótica, asistir en la navegación y permitir que las máquinas perciban su entorno.
Q2: ¿Los sensores de obstáculos Arduino tienen garantía?
A2: Los sensores de obstáculos Arduino pueden tener garantías, pero la duración y los términos pueden variar según el fabricante o proveedor. Generalmente, una garantía asegura que el producto esté libre de defectos en materiales y mano de obra bajo un uso normal.
Q3: ¿Se pueden utilizar los sensores de obstáculos Arduino para aplicaciones interiores y exteriores?
A3: Sí, los sensores de obstáculos Arduino se pueden utilizar para aplicaciones interiores y exteriores. Sin embargo, algunos sensores pueden ser más adecuados para su uso al aire libre que otros, dependiendo de su durabilidad ambiental y condiciones.
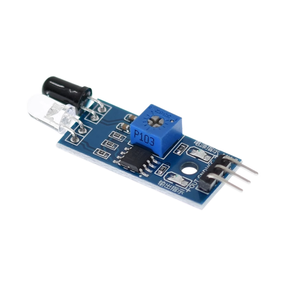
Q4: ¿Cuáles son las ventajas de los sensores de obstáculos ultrasónicos Arduino?
A4: Las ventajas de los sensores de obstáculos ultrasónicos Arduino incluyen medición de distancia sin contacto, alta precisión, amplio rango de detección y versatilidad. Son adecuados para varias aplicaciones, incluyendo detección de obstáculos, detección de proximidad y tareas de automatización.