Tipos de Sensores de Posición Analógicos
Los sensores de posición analógicos son dispositivos que miden y reportan la posición de un objeto en movimiento. Se utilizan ampliamente en diversas industrias y vienen en diferentes tipos, cada uno con un diseño y aplicación únicos. Aquí están algunos de los tipos más comunes de sensores de posición analógicos:
- Sensores de Posición Potenciómetricos: Estos son los tipos más comunes de sensores de posición analógicos debido a su diseño simple y bajo costo. Están compuestos por un elemento resistivo y un contacto deslizante que se mueve a lo largo del elemento. Cuando el objeto mecánico se mueve, el contacto se desliza sobre el elemento resistivo y la tensión de salida cambia proporcionalmente a la posición del objeto.
- Sensores de Posición con Transformador Diferencial Variable Lineal (LVDT): Un sensor de posición LVDT es un tipo de sensor de posición que ofrece alta precisión, resolución y estabilidad. Tienen un transformador con tres bobinas dispuestas de una manera específica. La bobina primaria suministra la señal de excitación AC, mientras que las dos bobinas secundarias están ubicadas en lados opuestos de la bobina primaria. Un núcleo ferromagnético dentro del LVDT se mueve linealmente, y su posición cambia la inductancia entre las bobinas, lo que resulta en una señal de salida AC que es proporcional a la posición del núcleo.
- Sensores de Posición con Transformador Diferencial Variable Rotacional (RVDT): Estos son sensores de posición analógicos que se utilizan para medir la posición angular en lugar de la posición lineal. Utilizan el mismo principio de operación que los sensores de posición LVDT, pero su medición es rotacional. Tienen un elemento rotatorio, como un eje acoplado a un resistor variable, lo que provoca un cambio en la tensión de salida a medida que cambia la posición angular.
- Sensores de Posición de Efecto Hall: Estos sensores utilizan el principio del efecto Hall para detectar la posición de un campo magnético. Cuando se aplica un campo magnético perpendicular a una corriente eléctrica en un conductor, resulta en una tensión (tensión de Hall) que es proporcional a la intensidad del campo. En los sensores de posición, este cambio en la tensión de Hall se utiliza para medir el cambio de posición de un imán móvil en relación con el sensor.
- Sensores de Posición por Capacitancia: Estos son sensores de posición analógicos que miden los cambios en la capacitancia entre un sensor y un objetivo. Consisten en un condensador con una distancia variable entre el sensor y el objetivo, lo que lleva a un cambio en la capacitancia que es proporcional a la posición del objeto.
- Sensores de Posición Inductivos: Estos sensores utilizan el principio de acoplamiento inductivo para detectar la posición de un objeto objetivo. Consisten en un circuito oscilante con una bobina que genera un campo electromagnético. Cuando un objetivo conductor se acerca o se aleja de la bobina, resulta en un cambio en la inductancia del circuito, afectando la amplitud de oscilación. Este cambio en inductancia se utiliza para medir la posición del objetivo.
Especificaciones y Mantenimiento de Sensores de Posición Analógicos
La especificación de cualquier sensor es importante para decidir su idoneidad para cualquier aplicación. Aquí hay algunas especificaciones clave:
-
Señal de Salida
Los circuitos integrados y otros dispositivos electrónicos requieren sensores de posición con señales de salida bajas. Una señal de salida de bajo nivel está entre 0 a 1 voltios. Los sensores para aplicaciones industriales tienen señales de salida más altas, entre 1 a 10 voltios.
-
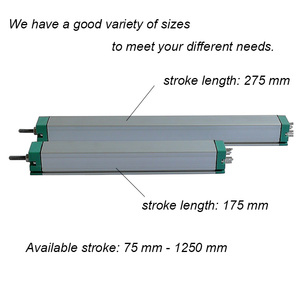
Rango de Medición
Los sensores de posición tienen diferentes rangos de medición dependiendo del tipo. Los sensores de posición rotativos analógicos miden el ángulo de rotación de un eje. Su rango de medición está entre 0 a 360 grados o más.
-
Tensión de Alimentación
La tensión de alimentación se refiere a la potencia requerida para operar el sensor de posición. La mayoría de los sensores funcionan con una tensión de alimentación de 5 a 15 voltios. Sin embargo, algunos tienen una tensión de alimentación más alta, de alrededor de 24 voltios.
-
Linealidad
La linealidad es la capacidad de un sensor para producir una señal de salida proporcional a la entrada. Por ejemplo, si el desplazamiento se duplica, la señal de salida debería duplicarse. Un sensor de posición con alta linealidad tiene una desviación de aproximadamente 1 por ciento o menos.
-
Histéresis
La histéresis es la diferencia en las señales de salida cuando la entrada cambia en dirección creciente o decreciente. Por ejemplo, si el desplazamiento aumenta y luego disminuye, la señal de salida puede diferir. Un sensor de posición con baja histéresis tiene una desviación de aproximadamente 2 por ciento o menos.
-
Repetibilidad
Los sensores de posición analógicos para partes de vehículos necesitan ser muy precisos y exactos. El sensor debe proporcionar la misma señal de salida para la misma entrada múltiples veces. Por ejemplo, si un técnico realiza una prueba en un sensor de posición, debería dar los mismos resultados cada vez. La repetibilidad de un sensor de posición está dentro de 1 por ciento o menos.
-
Rango de Temperatura
Los sensores de posición pueden operar en diferentes condiciones ambientales. Sin embargo, algunos tienen un rango de temperatura limitado. El rango de temperatura de un sensor de posición es de -40 a 85 °C.
-
Opciones de Montaje
Los sensores de posición analógicos tienen diferentes métodos de montaje. Algunos se montan en la superficie utilizando tornillos o pernos. Otros están integrados dentro de un componente o módulo.
El mantenimiento de los sensores de posición analógicos es importante para minimizar el desgaste y mejorar su vida útil. Aquí hay algunos útiles consejos de mantenimiento:
- Realizar inspecciones regulares para verificar cualquier signo de daño.
- Limpie la carcasa del sensor y las partes expuestas para eliminar suciedad, polvo y escombros.
- Asegúrese de que todas las conexiones eléctricas estén seguras y apretadas.
- Reemplace componentes dañados, como juntas tóricas, empaques y sellos.
- Lubrique las partes móviles del sensor utilizando el lubricante recomendado.
- Calibre el sensor periódicamente para asegurarse de que siga siendo preciso.
- Monitoree el rendimiento del sensor para detectar cualquier cambio.
Cómo Elegir un Sensor de Posición Analógico
Elegir el sensor de posición correcto para una aplicación específica puede ser una tarea desafiante. Aquí hay algunos consejos para ayudar a facilitar el proceso de decisión:
- Considere la posición requerida: La necesidad de conocer la posición exacta de un objeto debe ser tenida en cuenta. Si la posición exacta no es muy importante, entonces se puede elegir un sensor menos preciso.
- Piense en el movimiento: Debe considerarse el tipo de movimiento que se necesita detectar. ¿Es lineal, rotacional o algún otro tipo? Diferentes sensores están diseñados para diferentes tipos de movimiento.
- Condiciones ambientales: Se deben considerar las condiciones ambientales como temperatura, humedad, polvo y exposición a líquidos o químicos. Puede ser necesario utilizar sensores diseñados para entornos adversos en algunos casos.
- Montaje e instalación: Deben considerarse los aspectos de montaje e instalación. Se debe preguntar si el sensor puede ser montado e instalado fácilmente en la posición requerida. También se debe considerar el espacio disponible para montar el sensor.
- Tiempo de respuesta: Se debe considerar el tiempo de respuesta requerido para la aplicación. Algunos sensores tienen un tiempo de respuesta más rápido que otros, lo cual puede ser importante en aplicaciones que requieren una detección rápida de la posición.
- Señal de salida: Se debe considerar la señal de salida que requiere el sistema o dispositivo conectado. Se debe asegurar que la señal de salida del sensor sea compatible con el sistema receptor.
- Costo: El costo del sensor de posición debe ser considerado, ya que están disponibles en diferentes rangos de precios. Se deben evaluar las características y beneficios para asegurar que se obtenga el mejor valor por dinero.
Al considerar estos factores, se puede elegir el sensor de posición adecuado para una aplicación. Es importante evaluar cuidadosamente los requisitos y comparar diferentes opciones de sensores antes de tomar una decisión.
Cómo Hacerlo Uno Mismo y Reemplazar un Sensor de Posición Analógico
Reemplazar un sensor de posición analógico puede ser un proceso sencillo. Sin embargo, es necesario asegurarse de que se selecciona el sensor correcto para la aplicación específica. Aquí hay una guía general sobre cómo reemplazar un sensor de posición analógico:
- Precauciones de seguridad: Antes de trabajar en cualquier equipo, asegúrese de que se tomen todas las precauciones de seguridad. Esto incluye apagar el sistema, desconectar la alimentación y seguir los procedimientos de bloqueo/etiquetado si corresponde.
- Seleccione el sensor adecuado: Elija un nuevo sensor de posición analógico que coincida con las especificaciones del anterior. Considere factores como rango, señal de salida y opciones de montaje.
- Prepare el nuevo sensor: Si es aplicable, configure el nuevo sensor para que coincida con los ajustes del anterior. Esto puede incluir ajustar el rango o establecer la señal de salida.
- Monte el nuevo sensor: Instale el nuevo sensor en la misma ubicación que el anterior. Asegúrese de que esté montado de manera segura y correctamente alineado con el elemento medido.
- Conecte el cableado eléctrico: Desconecte el cableado eléctrico del sensor antiguo y conéctelo al nuevo. Consulte el diagrama de cableado si es necesario para garantizar las conexiones correctas.
- Conecte la señal de salida: La señal de salida del nuevo sensor debe conectarse al elemento receptor del sistema, como un controlador o una pantalla.
- Establezca el rango y la señal de salida del sensor: Una vez instalado, establezca el rango y la señal de salida del nuevo sensor para que coincidan con los requisitos del sistema.
- Pruebe el sensor: Antes de devolver el sistema a operación, pruebe el nuevo sensor para asegurarse de que está funcionando correctamente. Verifique la señal de salida para asegurarse de que corresponde a la posición que se está midiendo.
- Documente el reemplazo: Finalmente, documente el reemplazo, incluyendo las especificaciones del sensor, detalles de instalación y cualquier cambio de configuración realizado.
Preguntas y Respuestas
P1: ¿Cómo se utiliza el sensor de posición analógico en robótica?
R1: En robótica, los sensores de posición analógicos se utilizan para determinar la posición de las articulaciones y extremidades. Esta información ayuda a la unidad de control central a entender la postura del robot.
P2: ¿Cuál es la diferencia entre sensores de posición analógicos y digitales?
R2: Los sensores de posición digitales proporcionan datos discretos, mientras que los sensores de posición analógicos proporcionan datos continuos. En casos donde se requiere alta precisión, se prefieren los sensores de posición analógicos sobre sus contrapartes digitales.
P3: ¿Pueden los sensores de posición analógicos ser impermeables?
R3: Sí, es posible tener sensores de posición analógicos que sean impermeables. Estos sensores tienen carcasas especiales que están diseñadas para operar en ambientes húmedos. También son adecuados para aplicaciones en entornos marinos.








































































































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4