
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1883 productos disponibles)




 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship


































































 Ready to Ship
Ready to Ship



































































 Ready to Ship
Ready to Ship




























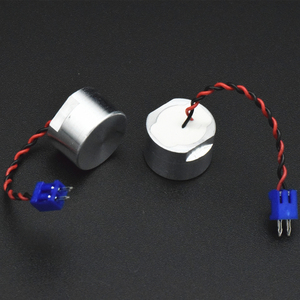
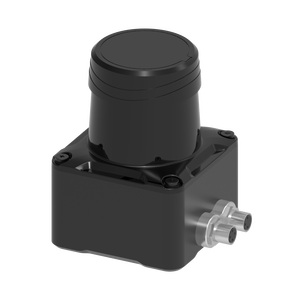
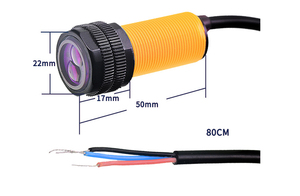
Los sensores para la detección de obstáculos son tecnologías utilizadas en diversas aplicaciones para identificar y localizar obstáculos en el entorno. Estos sensores juegan un papel crucial en la mejora de la seguridad y la habilitación de la navegación autónoma. Existen diferentes tipos de sensores para la detección de obstáculos, incluyendo:
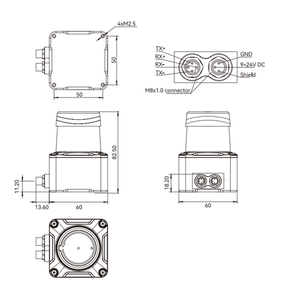
Los fabricantes de dispositivos sensores para la detección de obstáculos proporcionan varias especificaciones para ayudar a los compradores a comprender las capacidades de diferentes productos. Estas son algunas de las especificaciones más comunes que los compradores encontrarán:
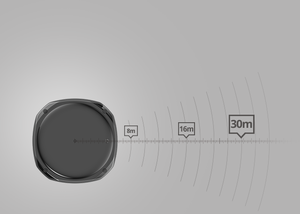
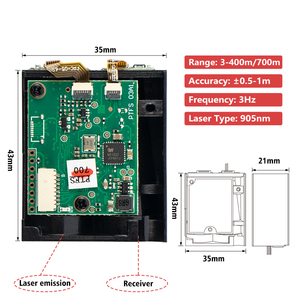
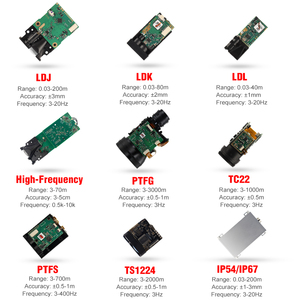
Rango de detección
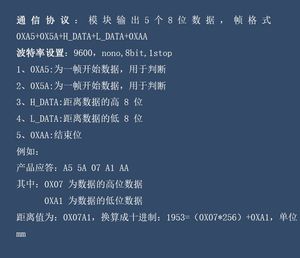
El rango de detección se refiere a la distancia máxima a la que se puede detectar un obstáculo. Para los sensores ultrasónicos, este rango es de 0,2 m a 8 m. Los sensores Lidar tienen un rango más largo, con algunos que alcanzan los 200 m. Sin embargo, el rango de detección de los sensores Lidar puede variar dependiendo de las condiciones climáticas y de iluminación.
Campo de visión (FOV)
El campo de visión es el área que un sensor de detección de obstáculos puede escanear. Los sensores con un amplio campo de visión pueden detectar obstáculos en un área amplia. El FOV se mide en grados. Para las cámaras, el campo de visión es de 60 a 120 grados. Los sensores Radar tienen un campo de visión de 20 a 60 grados.
Resolución
La resolución determina la capacidad de un sensor para detectar obstáculos pequeños. Un sensor con alta resolución puede detectar obstáculos más pequeños que uno con menor resolución. Por ejemplo, una cámara HD puede detectar obstáculos más pequeños que una cámara estándar. Los sensores Lidar también vienen en diferentes resoluciones, con algunos que ofrecen una detección de obstáculos más detallada que otros.
Entorno operativo
Los diferentes sensores tienen entornos operativos específicos. Algunos están diseñados para uso exclusivo en interiores, mientras que otros pueden funcionar bien en exteriores. Además, algunos sensores pueden soportar temperaturas extremas, humedad y exposición al polvo o la humedad. Los sensores con clasificación IP están protegidos contra el polvo y el agua.
Consumo de energía
Los sensores de bajo consumo son ideales para dispositivos alimentados por batería porque prolongan la duración de la batería. Sin embargo, estos sensores pueden requerir cargas más largas o tener un rango operativo reducido. Por otro lado, los sensores de alta potencia proporcionan más energía y pueden operar continuamente sin tiempos de carga largos.
El mantenimiento adecuado de los sensores para la detección de obstáculos es crucial para garantizar un rendimiento duradero y óptimo. Estas son algunas prácticas generales de mantenimiento para diferentes tipos de sensores de detección de obstáculos:
La elección del sensor adecuado para la detección de obstáculos depende de varios factores, incluyendo:
Requisitos de la aplicación
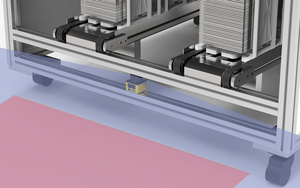
Esto implica considerar el propósito del sistema de detección de obstáculos. Por ejemplo, ¿es para asistencia de estacionamiento, navegación autónoma o seguridad industrial? Las diferentes aplicaciones tienen diferentes necesidades de sensibilidad y precisión.
Condiciones ambientales
Aquí, uno tiene que considerar el entorno operativo. Factores como las condiciones de iluminación, el clima (lluvia, niebla, nieve) y la presencia de polvo o residuos afectan el rendimiento del sensor. Elija sensores lo suficientemente robustos para soportar los desafíos ambientales.
Rango de detección
Uno debe considerar el rango de detección requerido en cada aplicación. Los diferentes sensores tienen rangos variables, y el elegido debe ser apropiado para evitar obstáculos innecesarios.
Fusión de sensores
A veces, la combinación de datos de varios tipos de sensores mejora la confiabilidad de la detección de obstáculos. Esto se debe a que aprovecha las fortalezas de cada tipo de sensor, mejorando el rendimiento general del sistema. Por ejemplo, la combinación de datos de radar y cámaras puede proporcionar un sistema de detección de obstáculos más robusto.
Coste y presupuesto
Uno debe considerar el presupuesto disponible. Los tipos y tecnologías de sensores varían en costo, por lo que es importante encontrar un equilibrio entre el rendimiento y la asequibilidad.
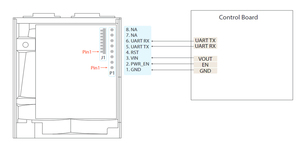
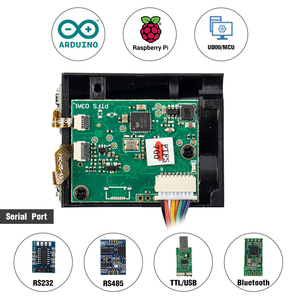
Integración y compatibilidad
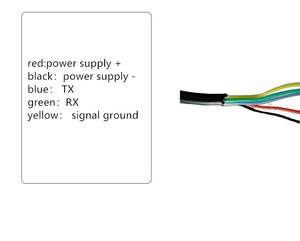
Uno debe considerar qué tan bien se integran los sensores para la detección de obstáculos con los sistemas existentes. Además, considere las opciones de conectividad y la compatibilidad con otros componentes (por ejemplo, controladores, pantallas).
Mantenimiento y confiabilidad
Uno debe considerar el nivel de mantenimiento requerido y la confiabilidad esperada del sensor. Elegir sensores confiables minimiza el tiempo de inactividad del sistema y reduce los costos de mantenimiento.
Interfaz de usuario y retroalimentación
Los sensores elegidos deben tener una interfaz de usuario que proporcione una retroalimentación clara en caso de un obstáculo. Uno debe considerar el método de retroalimentación (visual, auditivo, háptico) y la claridad de la información.
Reemplazar los sensores para la detección de obstáculos puede ser un proceso sencillo que se puede realizar en casa con las herramientas y el conocimiento adecuados. Siga esta guía para aprender a reemplazar un sensor de estacionamiento. Antes de comenzar, asegúrese de tener lo siguiente:
Guía paso a paso:
P1: ¿Dónde se utilizan los sensores para la detección de obstáculos?
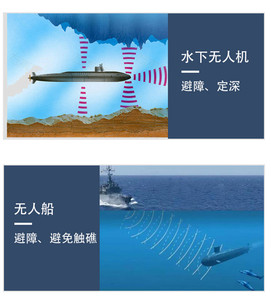
A1: Los sensores de detección de obstáculos se utilizan ampliamente en diversas aplicaciones, incluyendo vehículos autónomos, robótica, navegación de drones, sistemas de realidad virtual y automatización industrial.
P2: ¿Cuáles son las ventajas de utilizar sensores de detección de obstáculos?
A2: Los sensores de detección de obstáculos mejoran la seguridad, aumentan la eficiencia, reducen el error humano y mejoran la capacidad general de los sistemas o vehículos.
P3: ¿Pueden los sensores de detección de obstáculos detectar todos los tipos de obstáculos?
A3: Si bien los sensores de detección de obstáculos están diseñados para detectar una amplia gama de obstáculos, su efectividad puede variar dependiendo del tipo de sensor y el tamaño, forma y material del obstáculo.











